

Robot hand-eye system calibration method, device and equipment and storage medium
A system calibration, robot hand technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as large errors and complicated conversion processes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
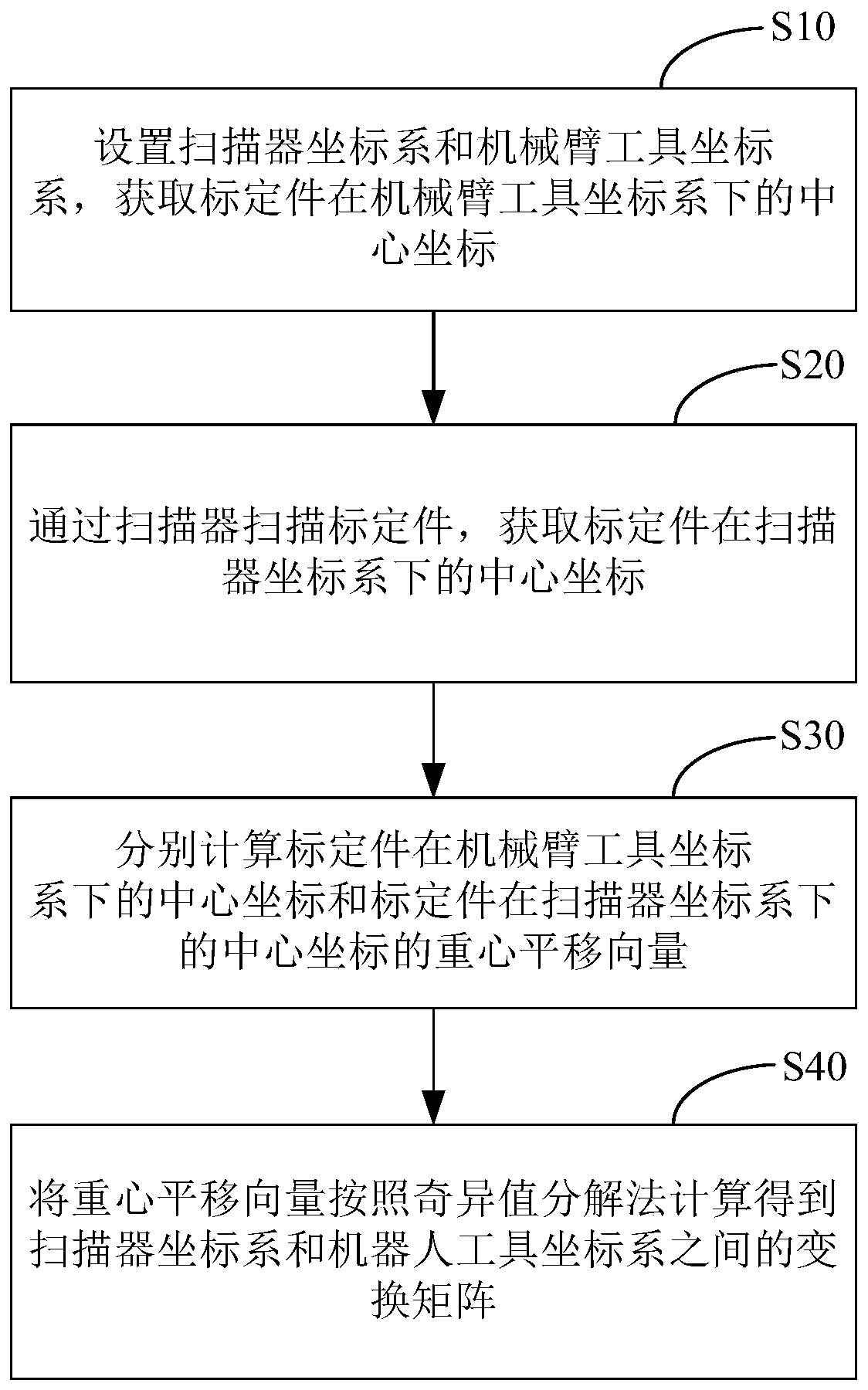
[0043] As an implementation manner, step S30 includes:
[0044] The coordinate vectors of the center of the three spheres in the tool coordinate system of the manipulator and the center coordinate vectors of the three spheres in the scanner coordinate system Calculate the arithmetic mean value separately to obtain the center-of-gravity coordinate vectors of the three spheres in the robot arm tool coordinate system and the center-of-gravity coordinate vectors of the three spheres in the scanner coordinate system
[0045] Calculate the coordinate vector of the center of the sphere according to the following formula The center of gravity translation vector of
[0046]
[0047] Calculate the coordinate vector of the center of the sphere according to the following formula The center of gravity translation vector of
[0048]
[0049] Step S40. Calculate the translation vector of the center of gravity according to the singular value decomposition method to obtai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More