Robot TCP calibration system based on vertical reflection
A vertical reflection and calibration system technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inefficiency and collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0054] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
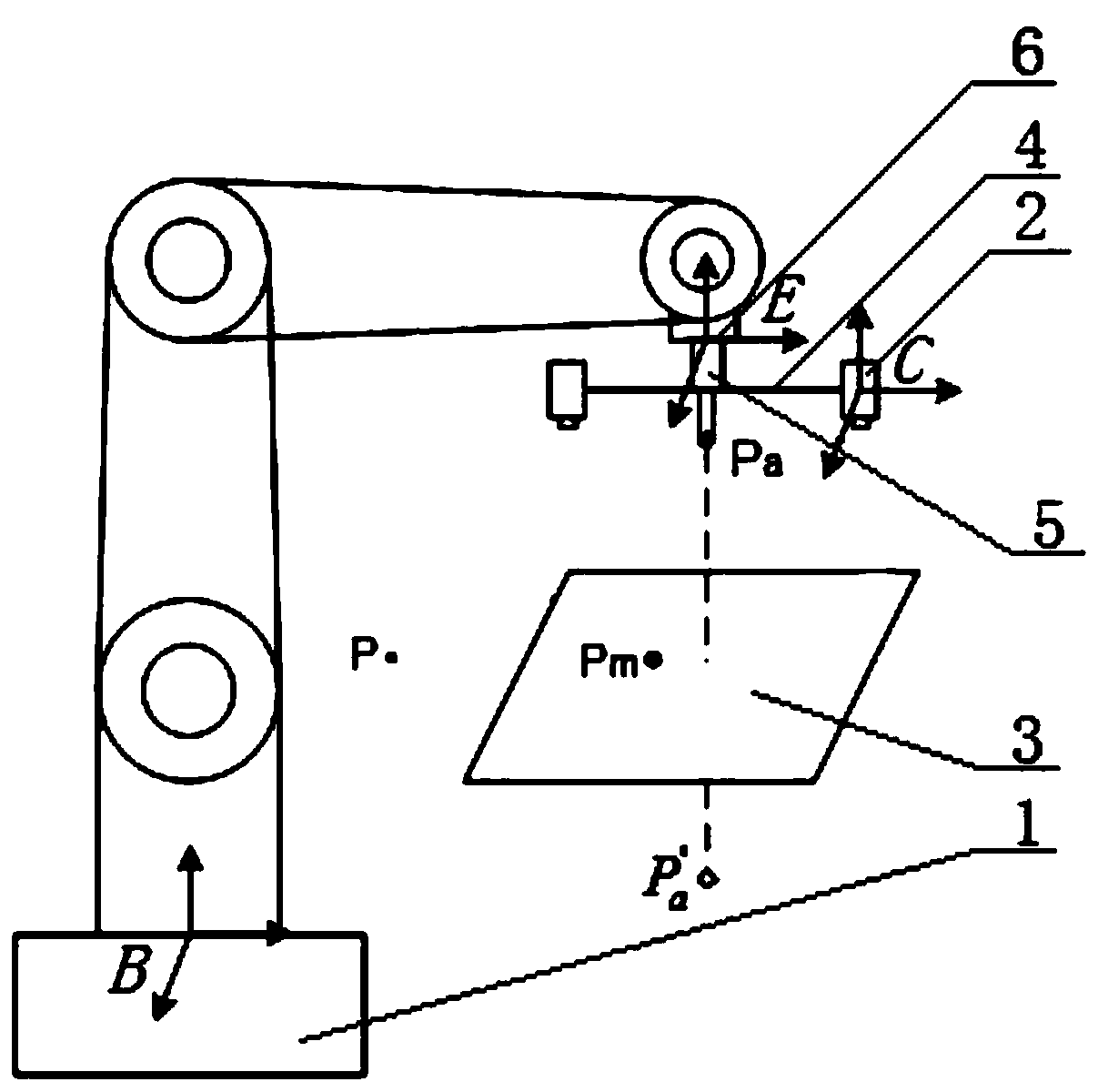
[0055] Such as figure 1 As shown, the embodiment of the present invention discloses a robot TCP calibration method based on vertical reflection, comprising the following steps:
[0056] (S1) Establish the binocular vision system coordinate system {C} on the binocular vision system; establish the robot end coordinate system {E} at the robot end 6, and determine the binocular vision system coordinate system {C} relative to the robot end coordinate system { The transformation matrix of E} For robot hand-eye relationship.
[0057] In this embodiment, in step (S1), the specific steps are:
[0058] (S101) establish the robot hand-eye relationship as Among them, R C It is the rotation matrix converted from the end coordinate system {E} of the robot and the coordinate system {C} of the binocular vision system and is a fixed value; T C is the translation vector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More