

Vehicle obstacle avoidance trajectory planning and tracking control method
A trajectory planning and tracking control technology, applied in vehicle position/route/altitude control, non-electric variable control, control/regulation system and other directions, can solve the problems of not considering the target path ahead, poor flexibility, and inability to learn
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] Describe technical scheme of the present invention in detail below in conjunction with accompanying drawing:
[0070] The present invention provides a vehicle obstacle avoidance trajectory planning and tracking control method, the method includes the following steps:
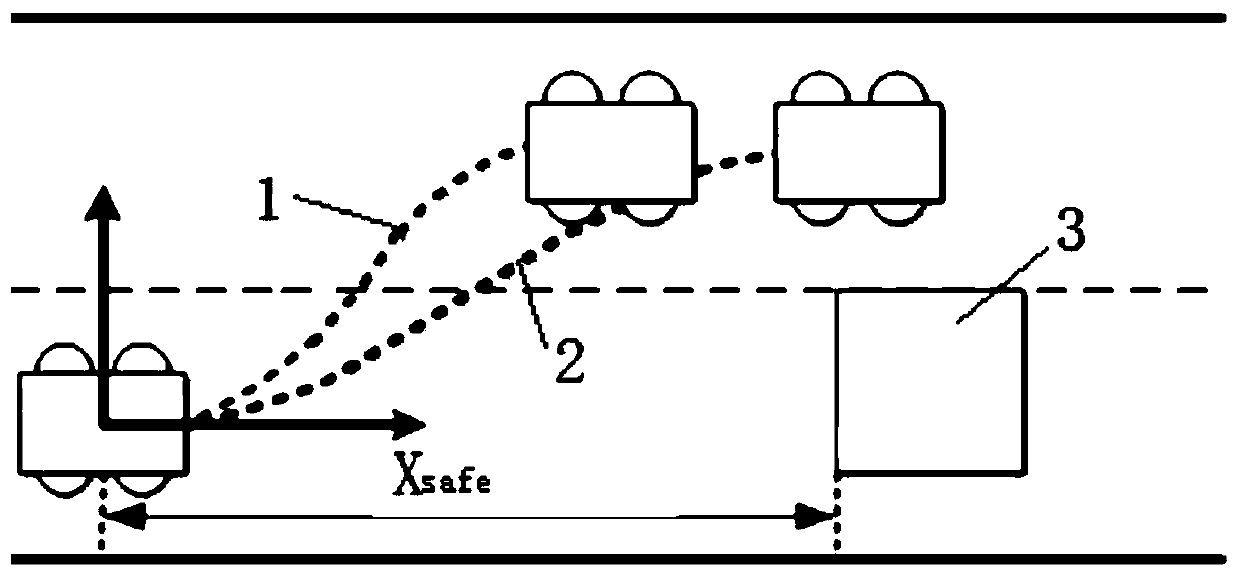
[0071] Step 1. An obstacle avoidance path planning based on the three-segment sinusoidal optimization idea is proposed: based on the on-board sensor system, when the vehicle detects an obstacle in the lane ahead, there are many ways to avoid the obstacle by steering the steering wheel ,Such as figure 2 The first path 1 and the second path 2, but the effects of these two paths on obstacle avoidance are different. The first path 1 is that the lateral displacement of the vehicle has exceeded the obstacle before the longitudinal displacement of the vehicle reaches the obstacle. The lateral position has achieved safe obstacle avoidance. The second path 2 is after the vehicle’s longitudinal displacement reach...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More