

Small fixed-wing UAV attitude control method based on H infinite loop forming algorithm
A control method and fixed-wing technology, applied in the field of aircraft control, can solve problems such as poor model control performance and poor robustness, and achieve the effects of improving stability and rapidity, improving robustness, and improving steady-state accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
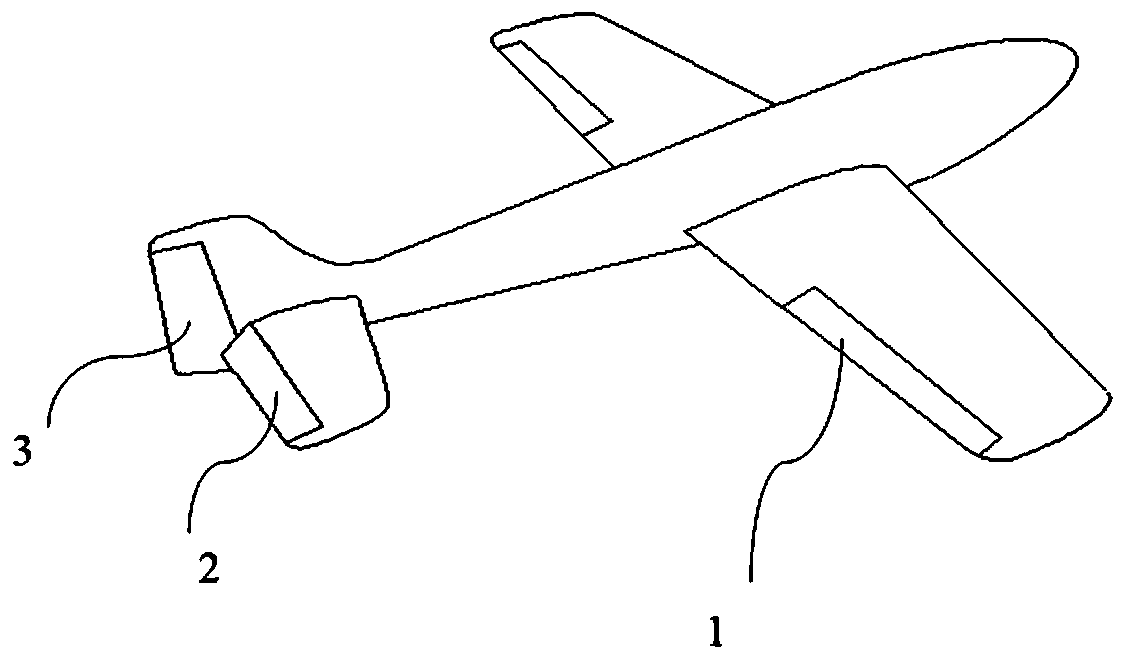
[0032] refer to figure 1 , small fixed-wing unmanned aerial vehicle, as the name suggests, the position of the wing remains unchanged, and most modern civil aviation aircraft and fighter jets are fixed-wing aircraft. Small fixed-wing drones generate forward thrust from engines or motors. According to Bernoulli's principle, the wings generate upward lift to offset the weight of the drone. The operating rudder surface has ailerons, rudders, and elevators.
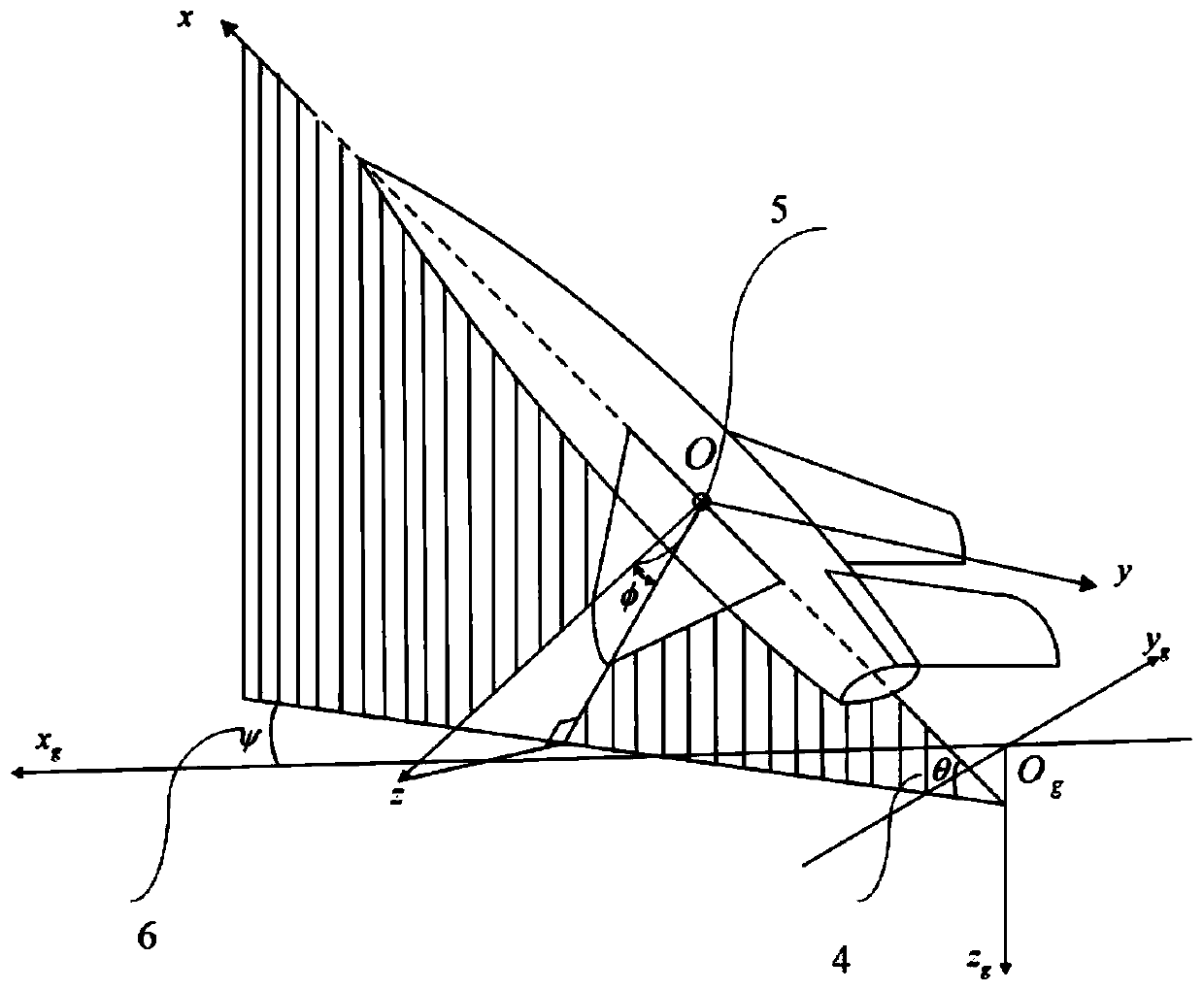
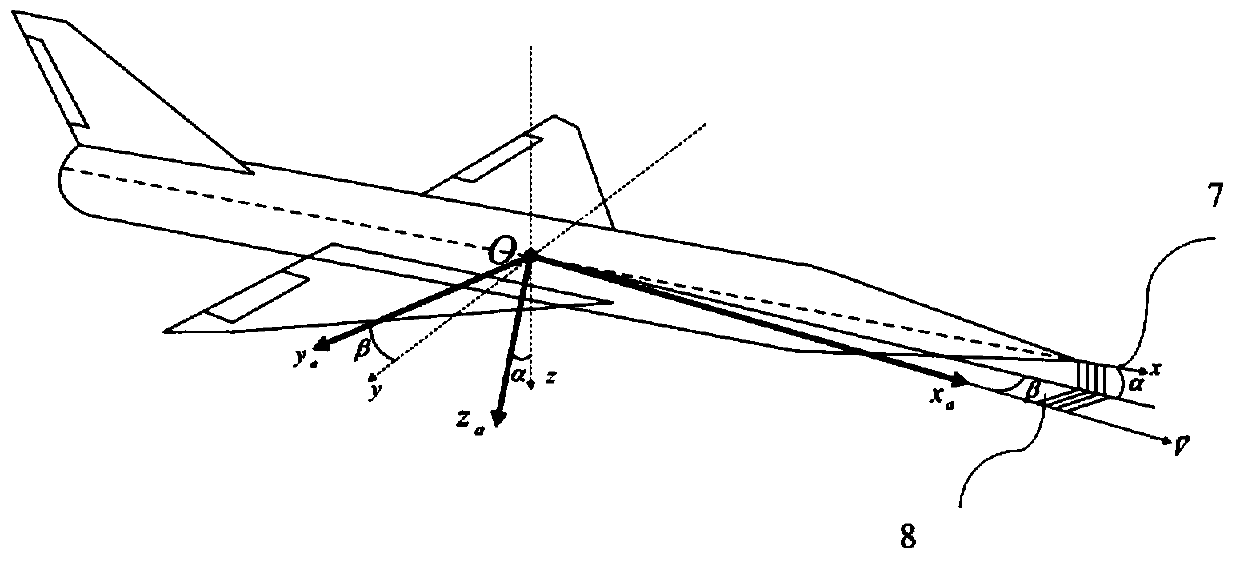
[0033] refer to figure 2 and 3 , assuming that the ground coordinate system is an inertial coordinate system, ignoring the curvature of the earth, and establishing a ground coordinate system (O g x g the y g z g ), body coordinate system (Oxyz) and airflow coordinate system (Ox a the y a z a ). Acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More