

Oil filter target recognition and positioning method based on machine version
A target recognition and machine vision technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve problems such as installation only, inflexible recognition and positioning, failure to meet intelligence and real-time requirements, and achieve Effects of improving contrast, strong matching flexibility, and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] In order to make the object, technical solution and features of the present invention clearer, the present invention will be described in further detail below with reference to the accompanying drawings.
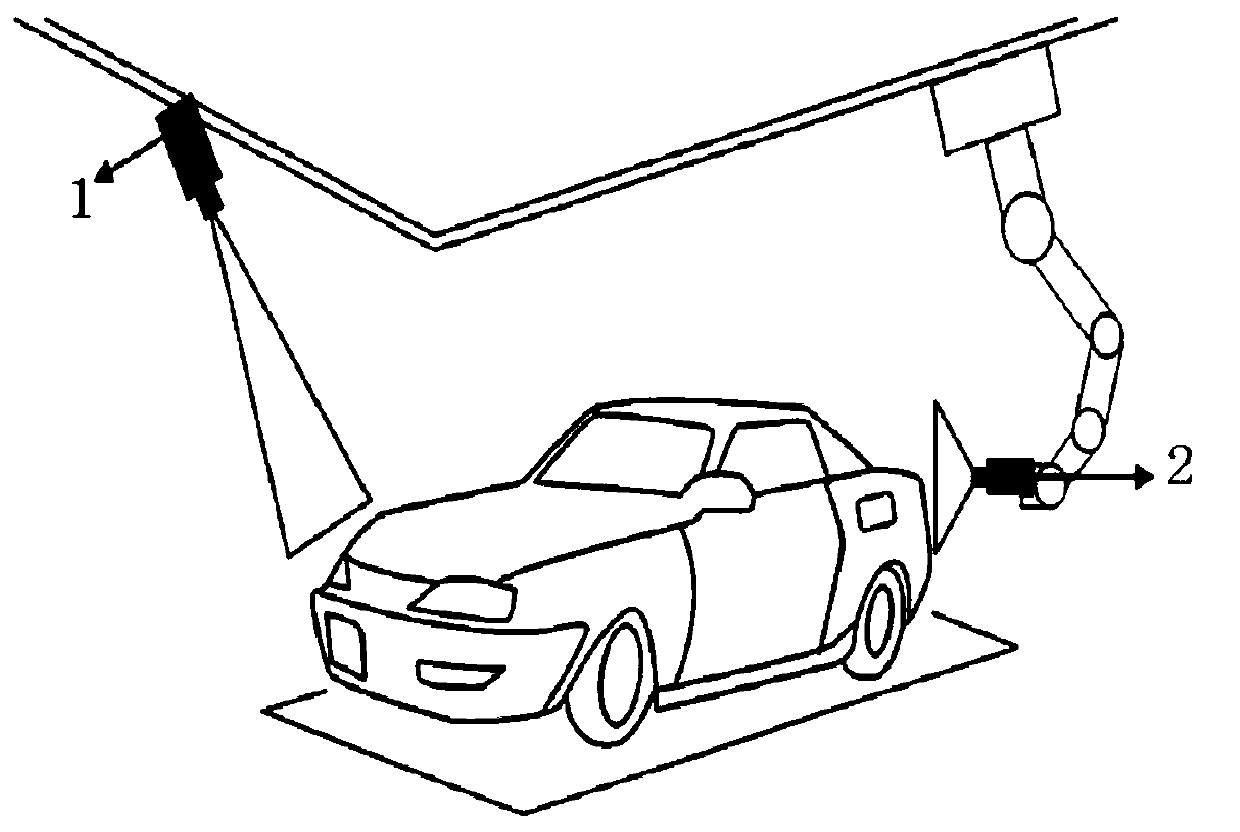
[0047] Such as figure 1 and Figure 9 As shown, a kind of machine vision-based refueling port target recognition and positioning method provided by the present invention comprises the following steps:
[0048] 1) The refueling station camera 1 obtains the license plate information of the vehicle to be refueled, and matches it with the customer order information;
[0049] 2) After the matching of the license plate information is completed, obtain the height of the refueling port and the template of the fuel tank cap of the vehicle to be refueled;
[0050] 3) The end of the robot moves to the height of the fuel filler port, and the end camera 2 collects images; the surface color of the fuel tank cap of the car is consistent with the overall color of the car body, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More