

Positioning and navigation method and device based on lidar and binocular camera
A technology of laser radar and binocular camera, which is applied in the directions of surveying and navigation, navigation, measuring devices, etc., to achieve the effect of fast matching and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with accompanying drawing:
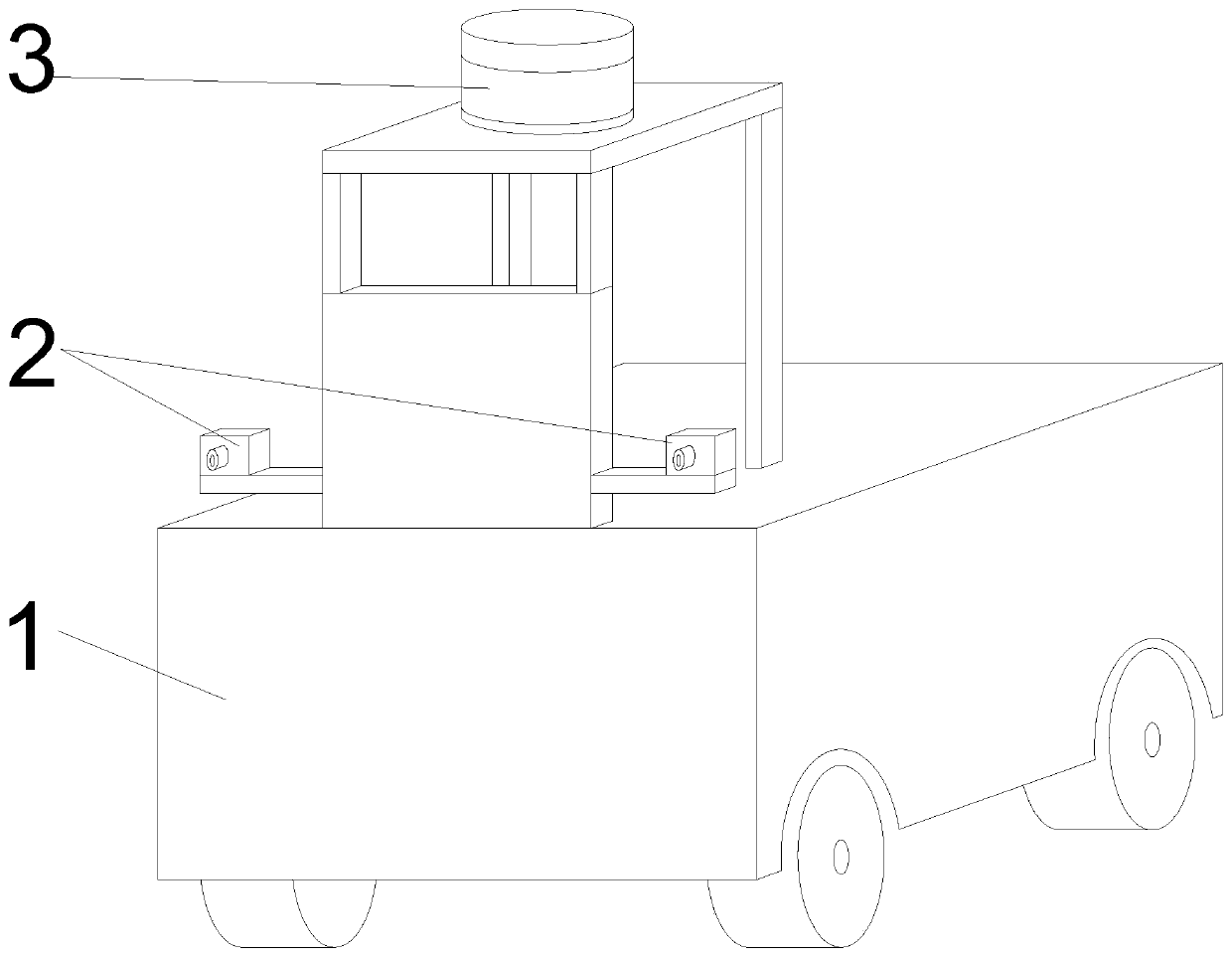
[0025] Such as figure 1 Shown: The positioning and navigation method based on lidar 3 and binocular camera 2, including steps:
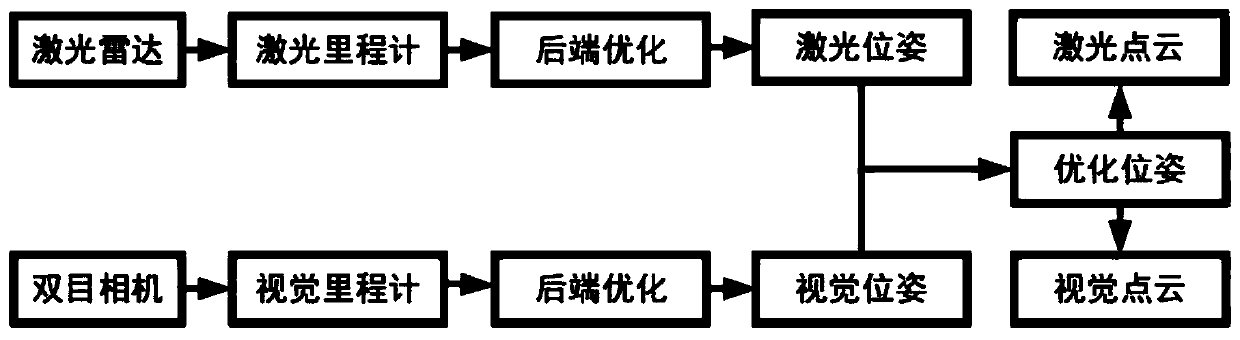
[0026] Obtain the camera image through the binocular stereo camera, process the image information from the binocular stereo camera to obtain the pose;
[0027] Obtain radar images through LiDAR 3, and process image information from LiDAR 3 to obtain poses;
[0028] The pose from the binocular stereo camera image and the pose from the lidar 3 are optimized and fused, and the dense point cloud model and sparse point cloud model of the environment are obtained for navigation and precise positioning respectively.
[0029] The image pose acquisition steps of the binocular stereo camera include:
[0030] 1. Extract feature points from the collected images obtained by the left and right cameras, and complete the matching of the feature points of the l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More