

A jumping robot with the function of attitude adjustment in the air
A robot and functional technology, applied in the field of jumping robots, can solve problems such as difficult landing, damage, and lack of air attitude adjustment functions, and achieve the effects of strong load capacity, precise control, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
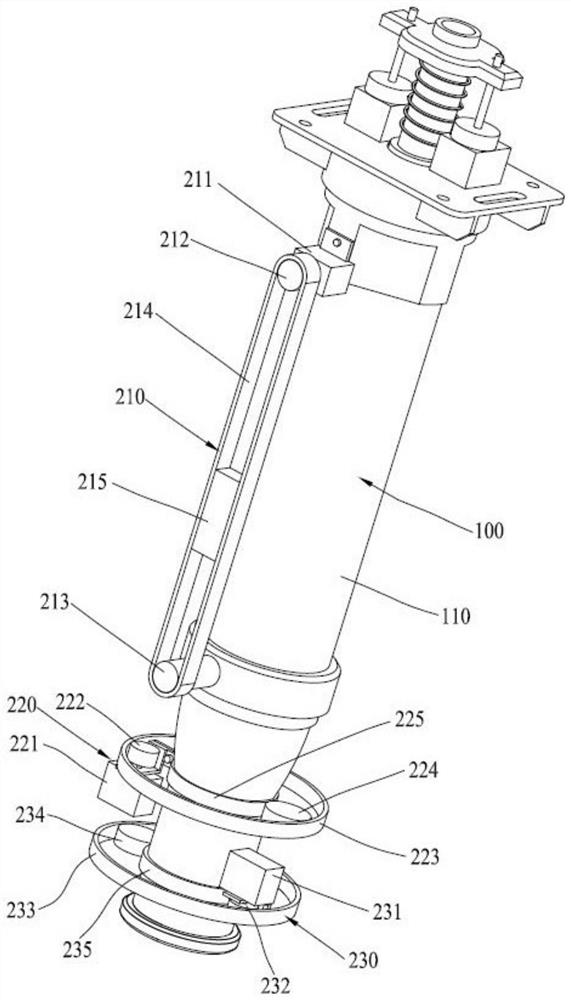
[0029] see figure 1 The jumping robot of the preferred embodiment of the present invention comprises a vertically elongated jumping device 100, a pitch angle adjustment device 210 and a yaw angle adjustment device arranged on the bottle body 110 of the jumper 100, and the yaw angle adjustment device includes a first yaw angle adjustment device. The yaw angle adjustment device 220 and the second yaw angle adjustment device 230, the first yaw angle adjustment device 220 and the second yaw angle adjustment device 230 are arranged at intervals in the longitudinal direction of the jumping device 100, and are all located at the pitch angle adjustment device 210. below.
[0030]The pitch angle adjusting device 210 comprises a first steering gear 211, a first transmission belt 214 driven by the first steering gear 211 and a mass block 215 arranged on the first transmission belt 214; the first transmission belt 214 is arranged longitudinally along the jumping device 100, and has The m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More