

Seabed garbage cleaning robot
A garbage cleaning and robotics technology, applied in the field of robotics, can solve the problems that the work target cannot be effectively grasped, it is difficult to achieve accurate modeling and control, and the scope of use is small, so as to improve the grasping efficiency and break the total amount of grasped garbage. Limitations, easy operation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
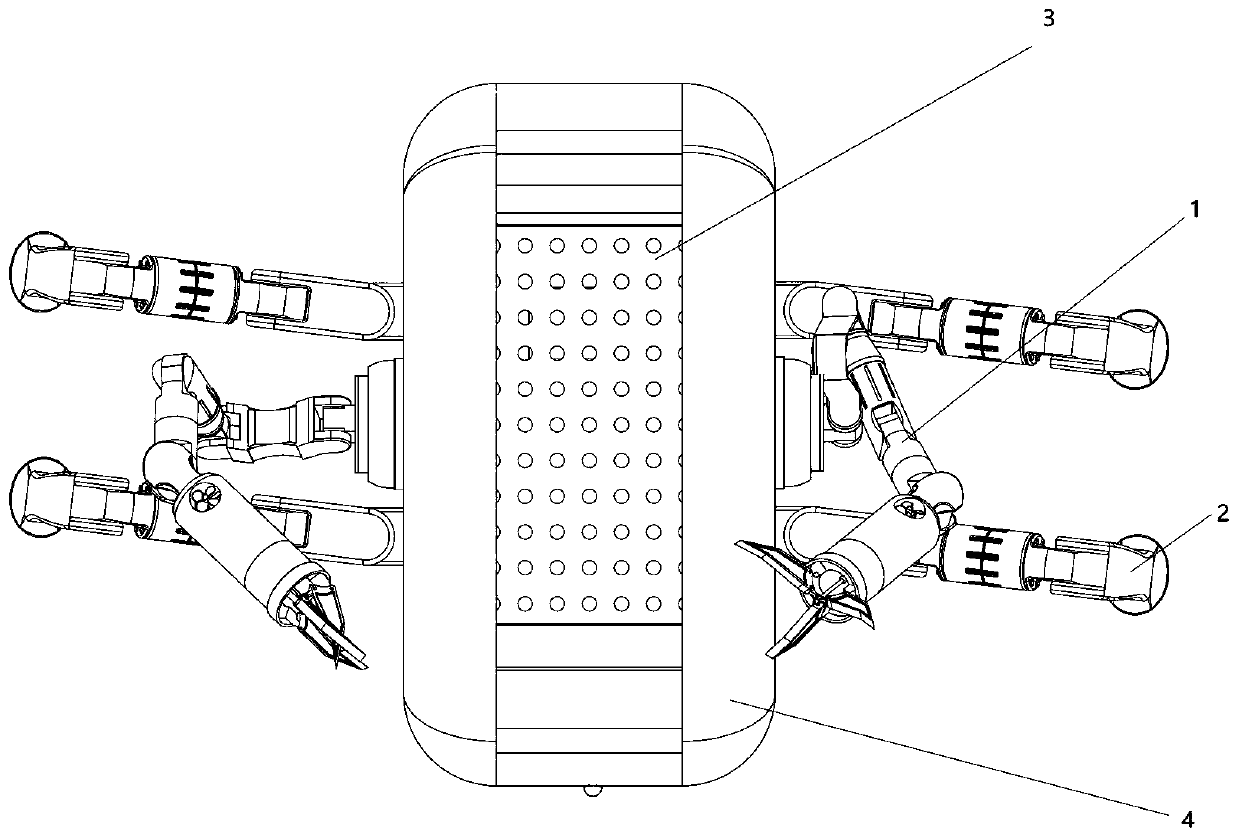
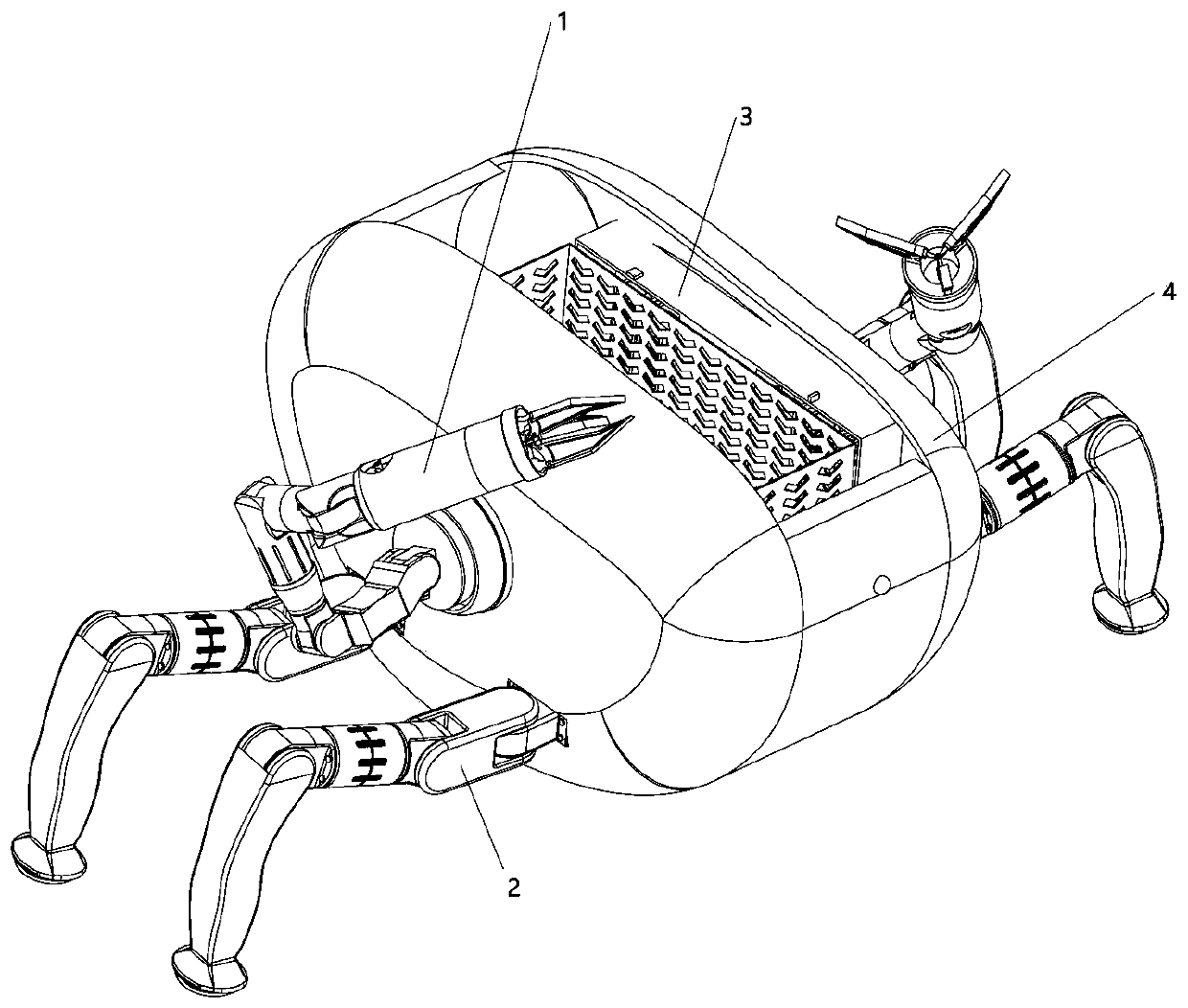
[0049] An underwater robot with a mechanical arm and a mechanical foot includes: a box structure 4 , a grasping structure 1 , a foot structure 2 , and a transport device 3 for step-by-step transmission.
[0050] Set the front-back direction of the robot as the longitudinal axis. The box part is arranged longitudinally, two grasping structures and four foot structures are symmetrically arranged on both sides of the outside of the box, and the step-by-step conveying device is symmetrically arranged on both sides inside the box, and the top of the box is left empty, which is convenient for garbage Pick and place.
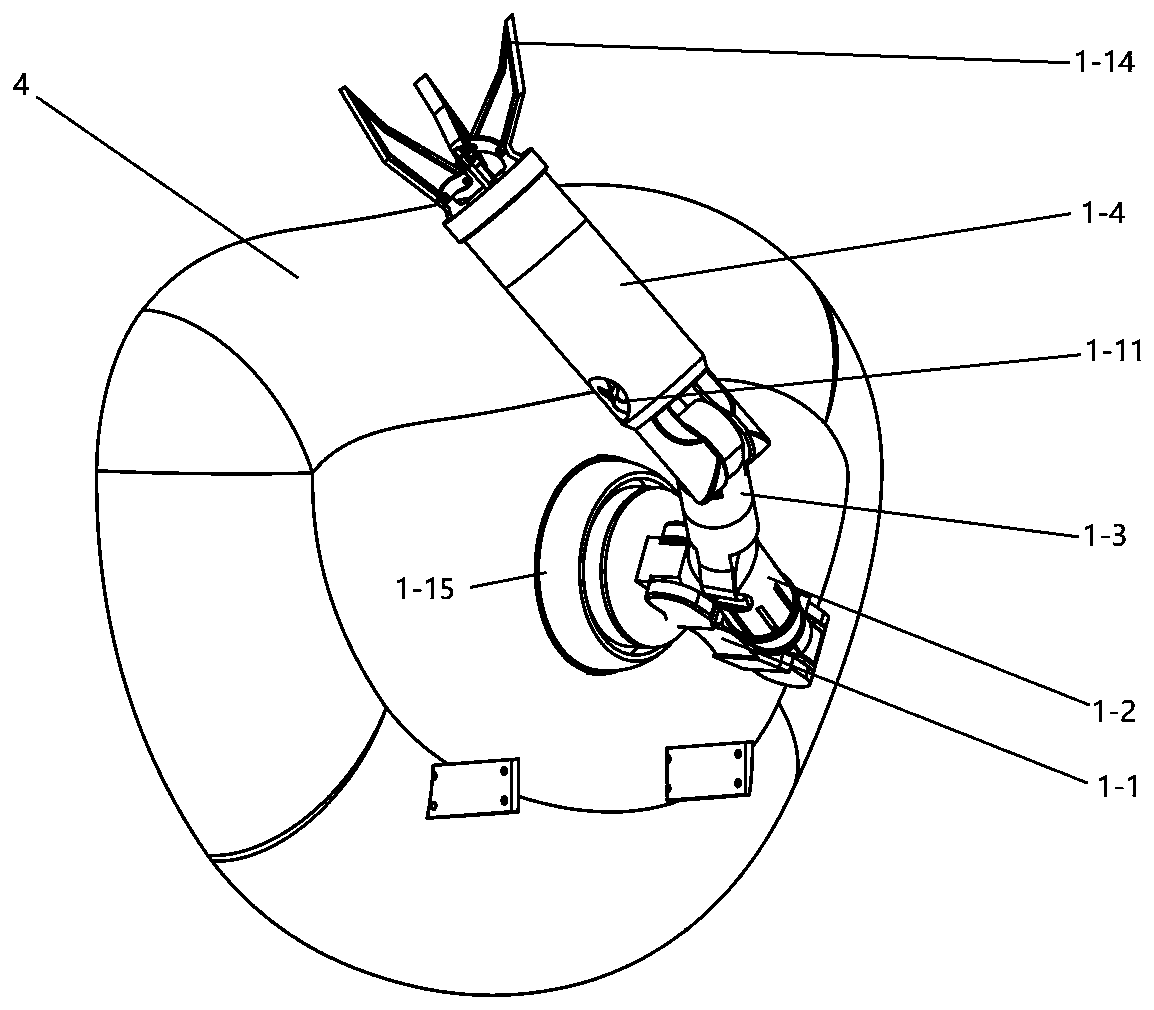
[0051] 1. Capture structure
[0052] refer to Figure 2-Figure 5 , the grasping structure includes a connecting joint 1-15, a multi-joint robot arm and a mechanical finger 1-14, the connecting joint is installed on the outer wall of the box structure, and the multi-joint robot arm is installed on the connecting joint, including sequentially connecting The first mech...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More