

Indoor positioning method for assisting in inertial navigation array based on map information
An indoor positioning and map information technology, applied in navigation, surveying and navigation, navigation through speed/acceleration measurement, etc., can solve the problems of high manpower and equipment costs, low positioning reliability, and difficulty in realizing it, so as to improve positioning accuracy and reliability, and the effect of reducing positioning costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
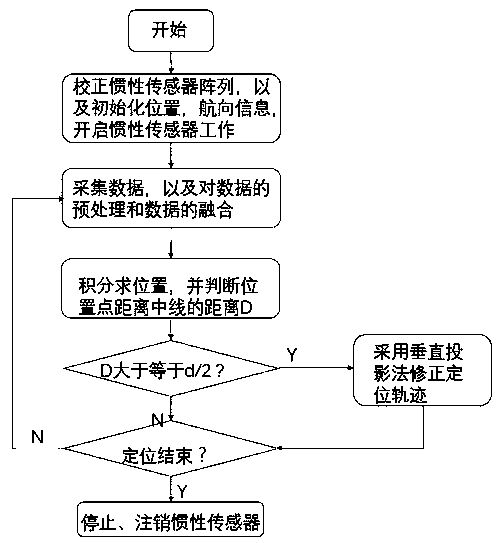
[0035] Example figure 1 As shown, the indoor positioning method of the present invention based on map information assisted inertial navigation array includes the following steps:
[0036] Step 1. Perform initial correction to the inertial sensor array, and correct the non-orthogonality of the inertial sensor sensitive axes under the initial conditions of the inertial navigation array;
[0037] Step 2. Establish the inertial sensor accelerometer model and fuse the accelerometer value. The accelerometer model is defined as:
[0038] y=a+b d +b v +v (1)
[0039] Among them, y is the measured acceleration value, a is the real acceleration value, b d is the deterministic bias error, b v is the random drift deviation, v is the measurement white noise that causes the rate random walk error, the rate random walk error is the high-frequency noise detected in a short time after the rate signal measured by the inertial sensor is integrated, and the short time is ignored In the offs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More