

Butt joint mechanism of reconfigurable robot
A technology for reconfiguring robots and docking mechanisms, applied in the field of robots, can solve problems such as complex structures, bulky volumes, and complex controls, and achieve the effects of compact volume, convenient and fast operation, and precise motion control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
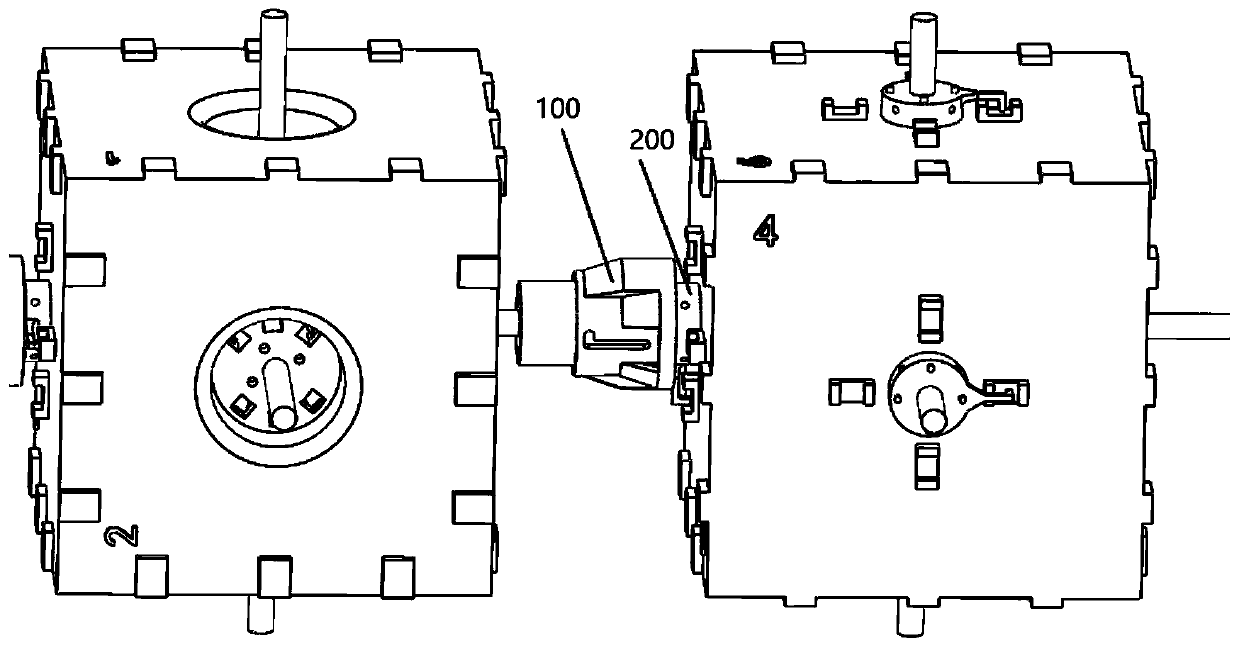
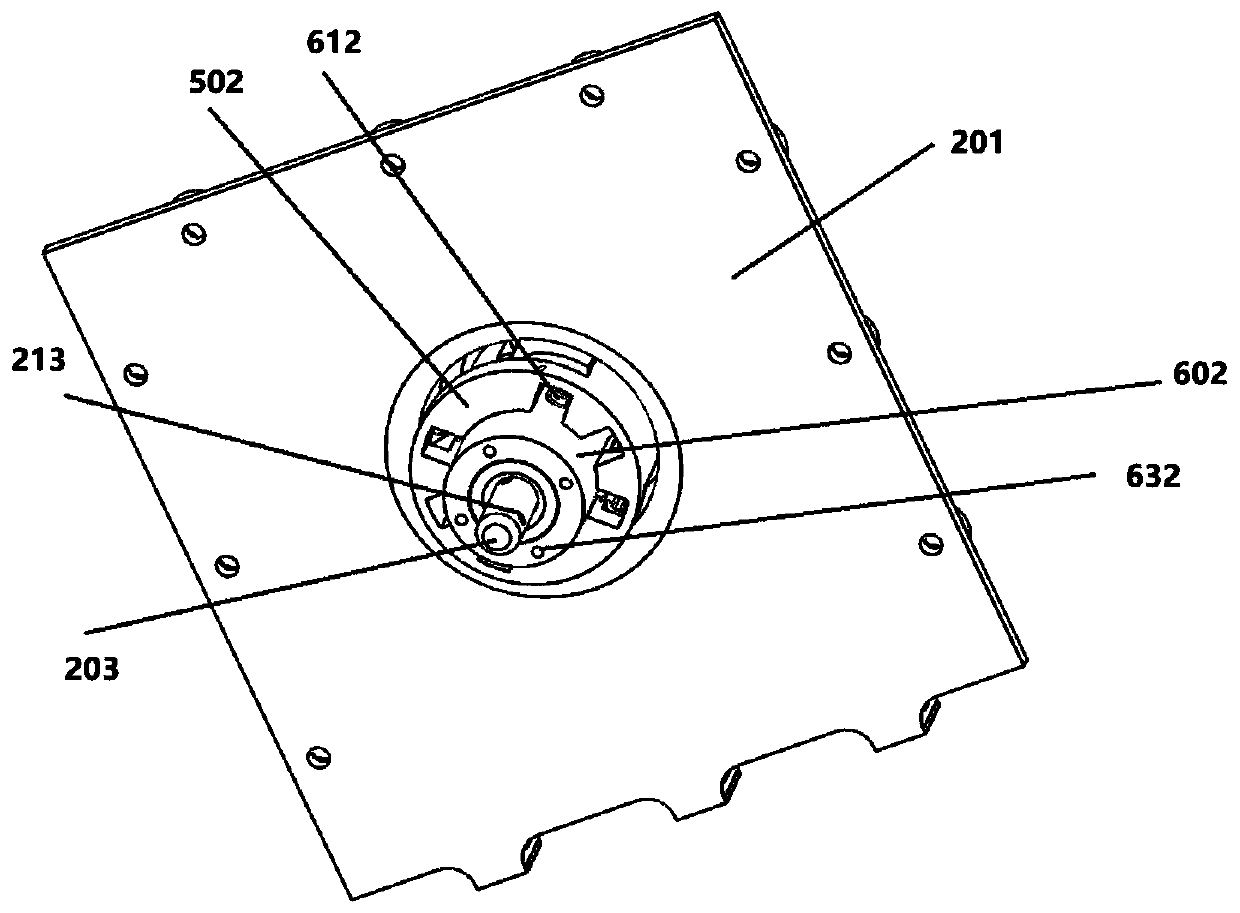
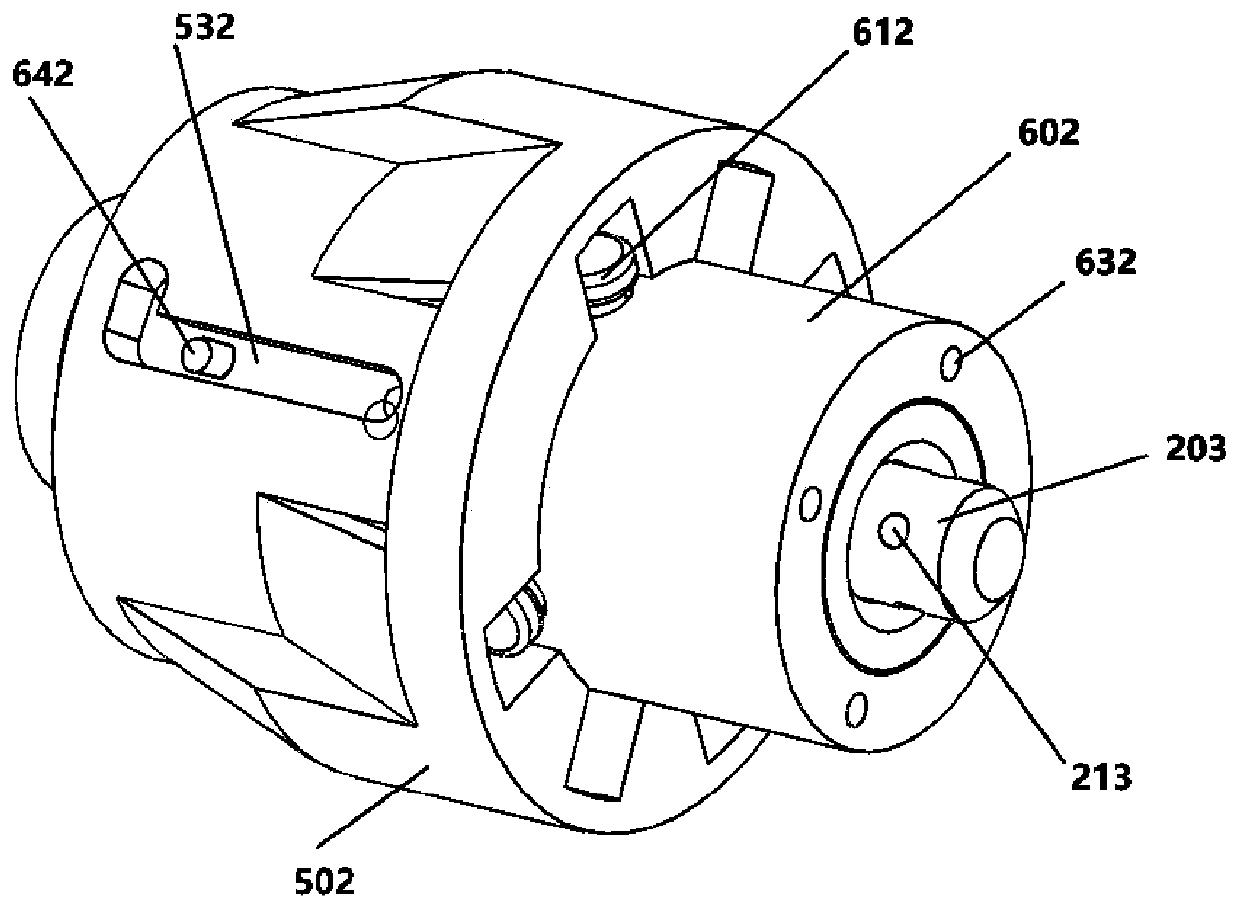
[0050] The docking mechanism of the reconfigurable robot of the present invention includes: an active surface module and / or a passive surface module; wherein, the active surface module includes: an active docking mechanism and a guide rod; the active docking mechanism can translate along the axis direction of the guide rod; the passive surface module The module includes: a passive docking mechanism; the active docking mechanism of a reconfigurable robot module is used to translate along the guide bar to dock with and fix the passive docking mechanism of another reconfigurable robot module, so that the active surface...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More