

Time-sharing four-wheel steering system of electric vehicle driven by hub motor and control method of time-sharing four-wheel steering system
A technology of four-wheel steering and electric vehicles, which is applied to automatic steering control components, electric vehicles, non-deflectable wheel steering, etc., and can solve the problem of different driver feeling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] Below in conjunction with accompanying drawing of description, the present invention will be further described.
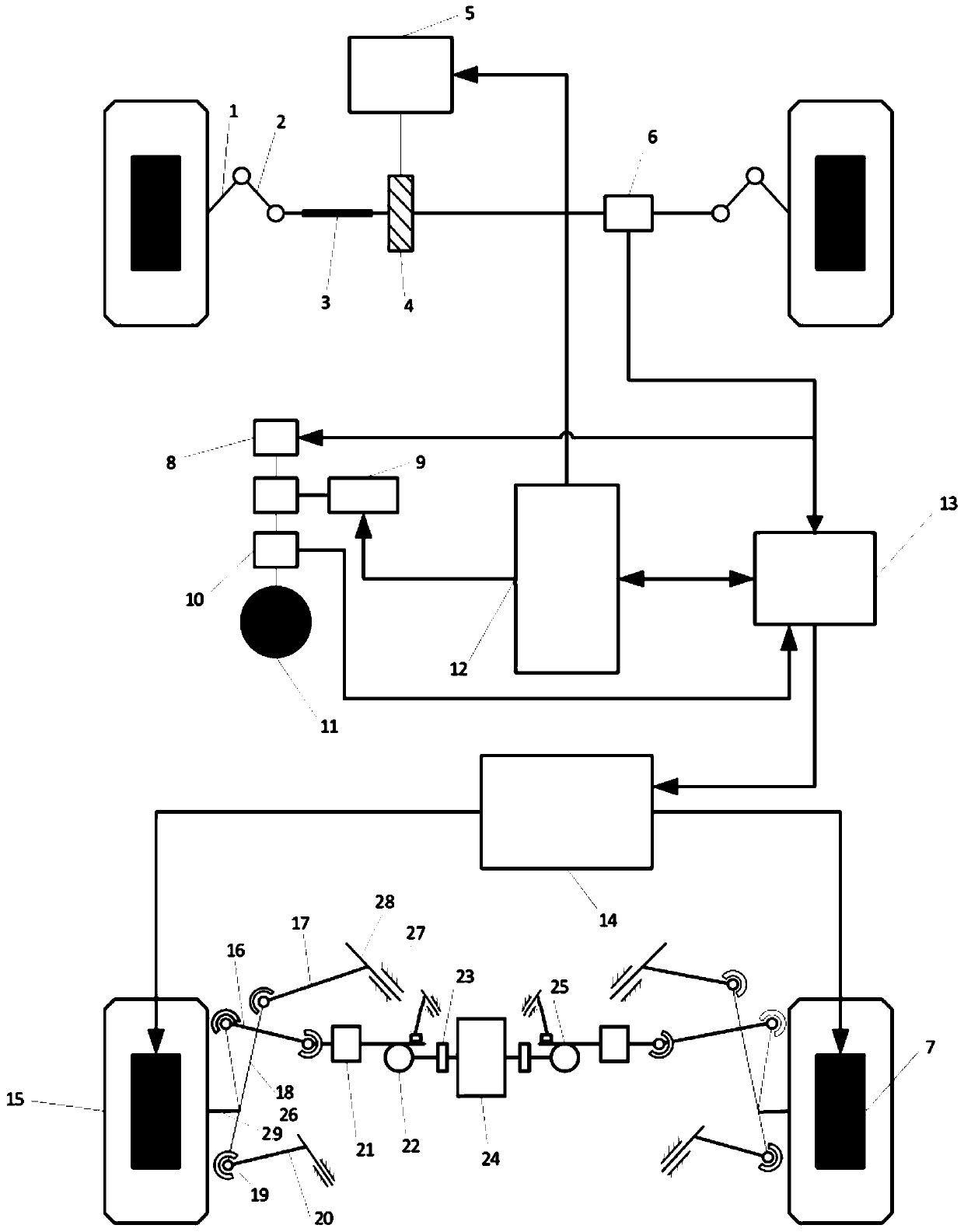
[0102] The invention provides a time-sharing four-wheel steering system for an electric vehicle driven by a hub motor, such as figure 1 shown, including:
[0103] The detection module is used to detect the driving parameters of the electric vehicle, and input the driving parameters to the vehicle controller 13; wherein, the driving parameters include the steering wheel angle signal, the pedal position signal of the accelerator pedal, the driving speed signal, the front wheel angle signal and the rear wheel angle signal. wheel angle signal;
[0104] The steering mode selection switch is used for the driver to artificially select the steering mode, the steering mode includes front-wheel steering and four-wheel steering, and the selected steering mode is input to the vehicle controller 13;
[0105] The vehicle speed tracking module is used to calculate the dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More