

Local accurate positioning method for rocker arm suspension structure patroller
A precise positioning and patrol technology, which is applied in the field of local precise positioning of roaming vehicles, can solve problems such as the influence of positioning results, the uncertainty of patrol movement, and local positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
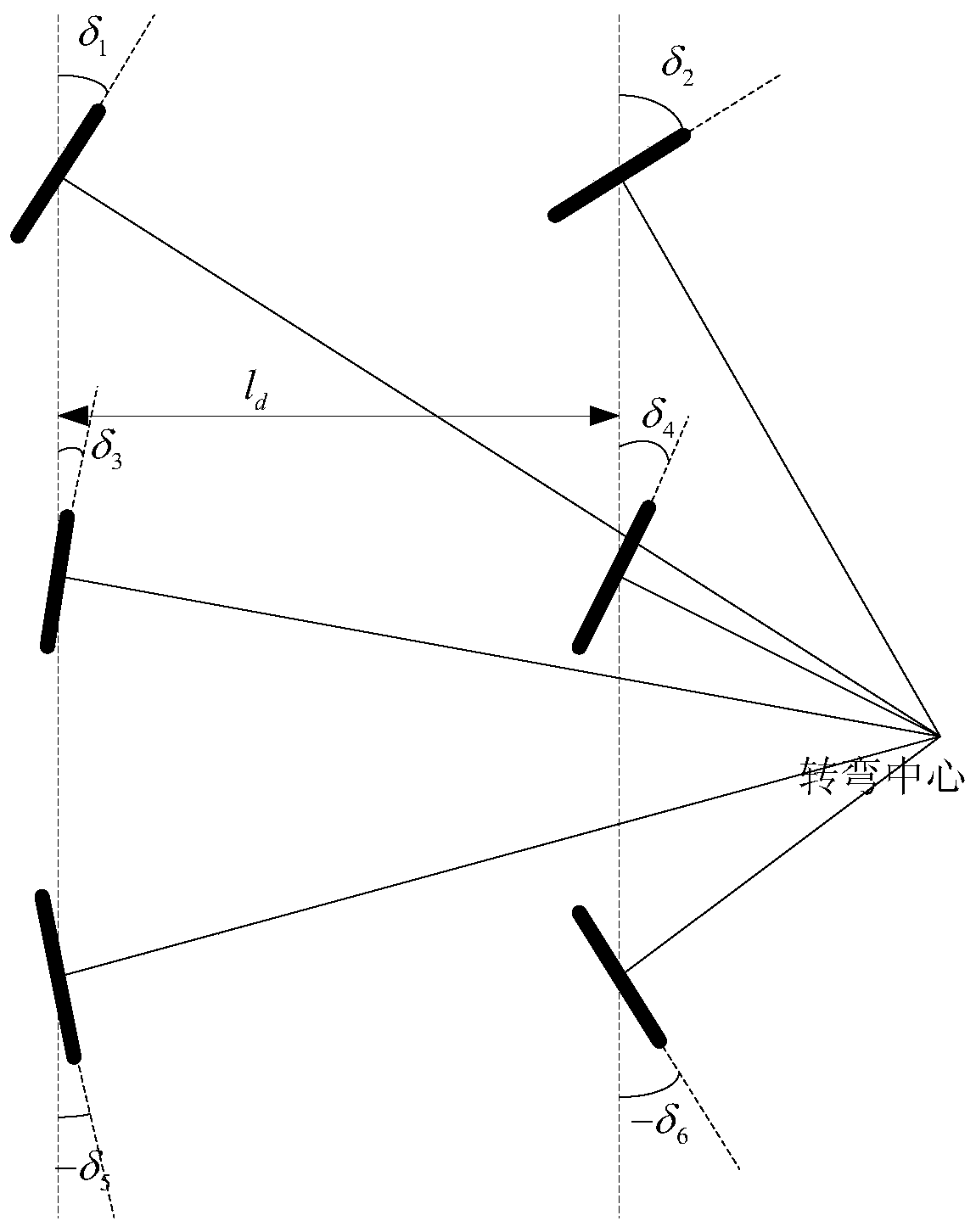
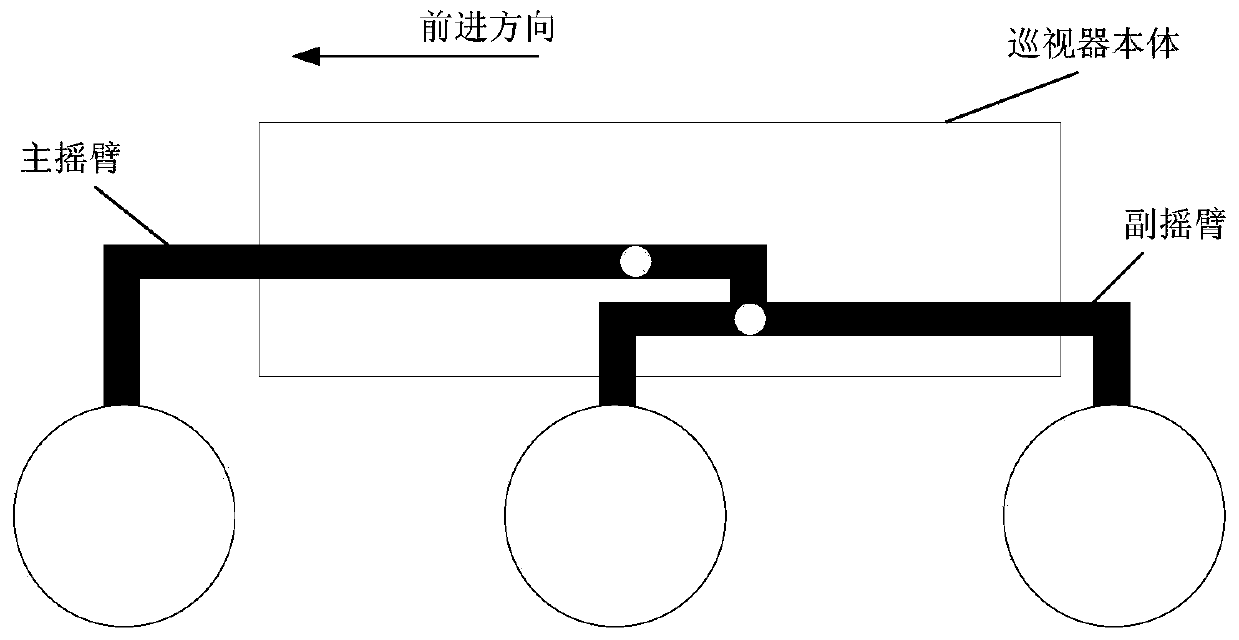
[0066] The rover has a rocker-suspended chassis structure with six-wheel steering and six-wheel drive, which can passively adapt to natural undulating terrain, so it belongs to a wheeled mobile robot with nonholonomic constraints. The patrol wheel system of the present invention comprises six wheels: two front wheels, two rear wheels and two middle wheels, each wheel has steering ability, and the six wheels are on the same plane or not on the same plane.
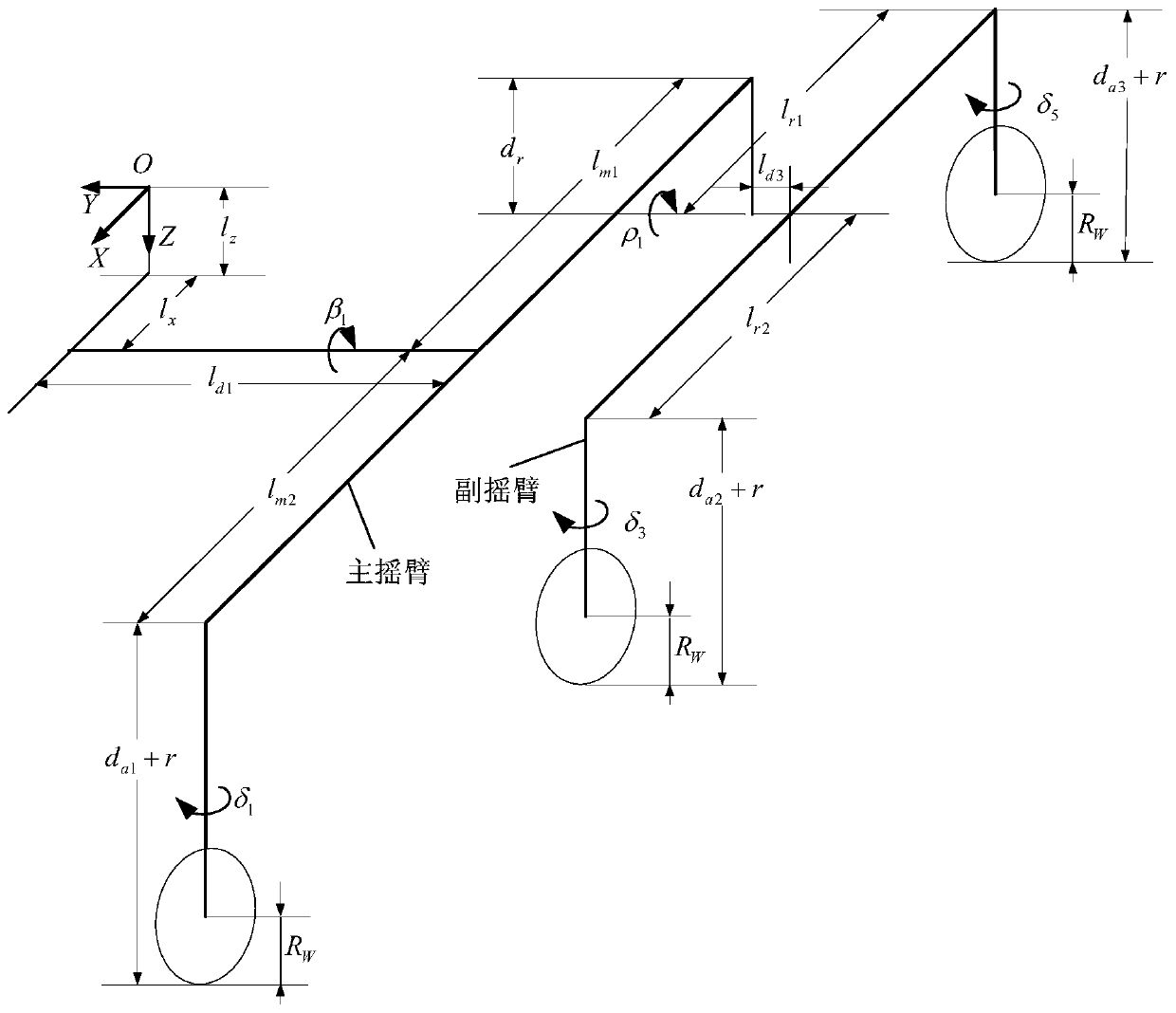
[0067] If the coplanarity of the wheels cannot be guaranteed during the movement of the patroller, and if the wheels are not on the same plane, the three-dimensional space relationship must be considered to adjust the positioning method of the odometer of the wheel train. The generated position changes of each wheel relative to the whole device are substituted into the algorithm.
[0068] Ide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More