

Movable robot
A mobile and robotic technology, applied in the field of robotics, can solve the problems of increasing the weight of the robot, the inability to carry path planning, and the high requirements for the drive motor, and achieve the effects of high cost, reduced weight of the entire machine, and high power-to-mass ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
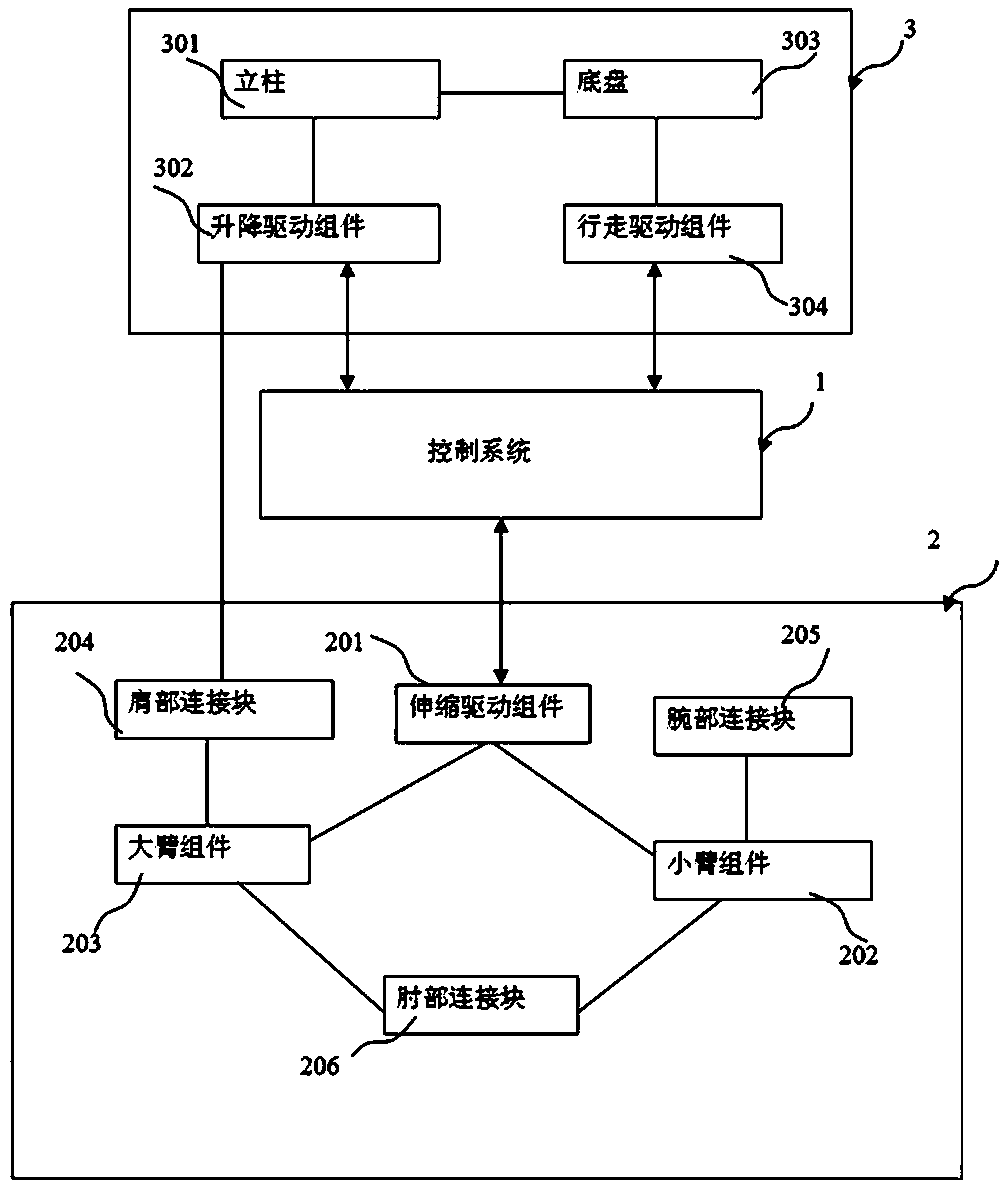
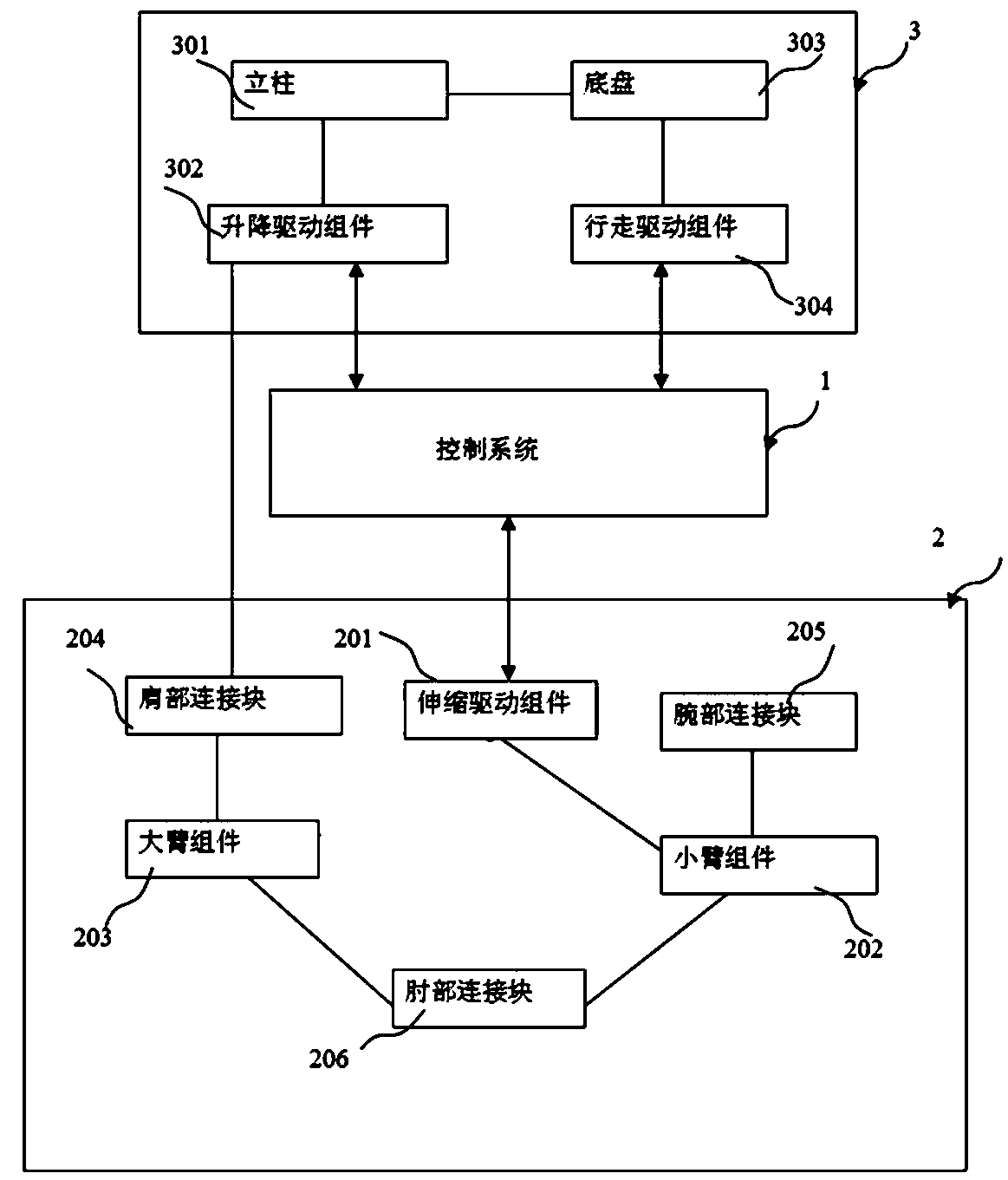
[0051] refer to figure 1 , the figure is the structural block diagram of the robot of the present invention, including a control system 1, which is used to receive information and control the mobile lifting column 3 and the mechanical telescopic arm 2 according to the information and control algorithm; , to achieve movement and / or zero-radius rotation according to the instructions of the control system; the mechanical telescopic arm 2 is slidably connected to the mobile lifting column 3 through the shoulder connecting block 204, and completes the vertical lifting motion according to the instructions of the control system, and is in the Under the control of the control system, the telescopic movement in the horizontal direction is carried out through the telescopic movement of the mechanical arm.
[0052] Specifically, the mechanical telescopic arm includes a large arm assembly 203 and a small arm assembly 202. The large arm assembly 203 and the small arm assembly 202 are rotat...
Embodiment 2
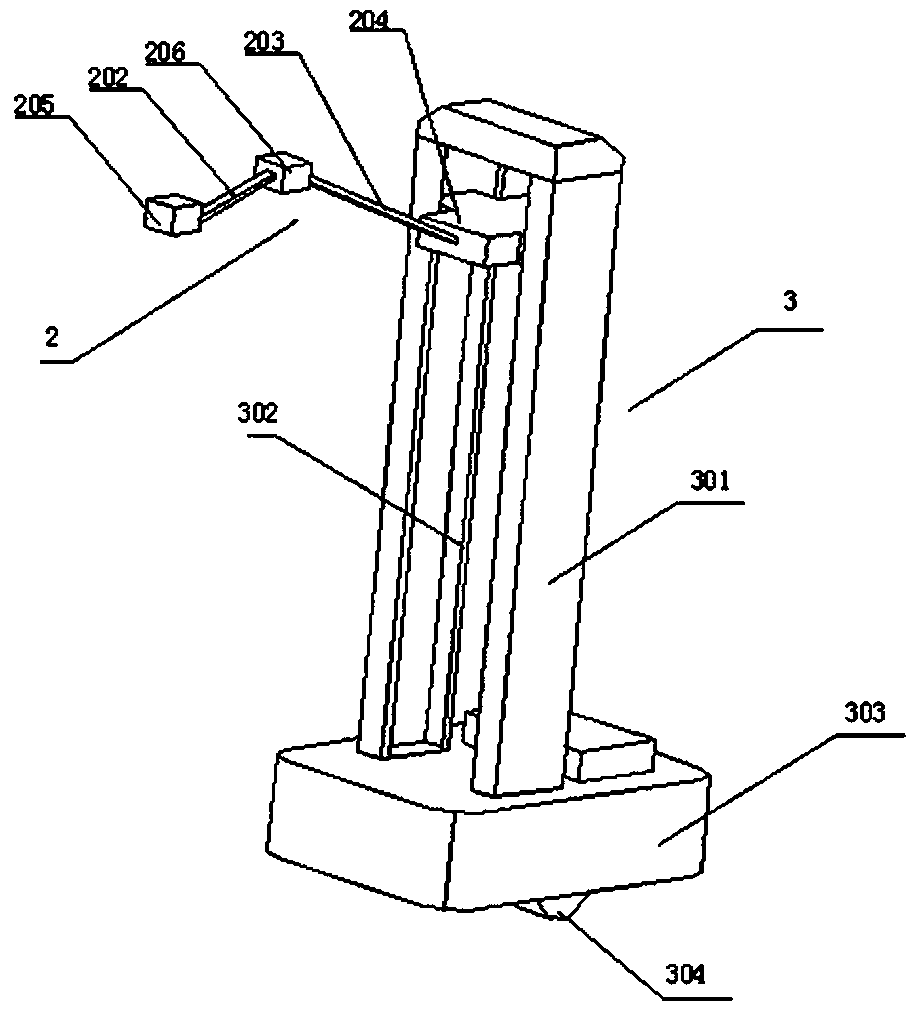
[0064] refer to image 3 , the figure is a schematic structural diagram of an embodiment of the robot of the present invention,
[0065] The robot includes a mechanical telescopic arm 2 and a mobile lifting column 3 , and the mobile lifting column 3 is connected with the mechanical telescopic arm 2 . The mechanical telescopic arm 2 includes a large arm assembly 203, a small arm assembly 202, a shoulder connecting block 204, an elbow connecting block 206 and a wrist connecting block 205; one end of the large arm assembly 203 is rotatably connected to the shoulder connecting block 204. The other end of the arm assembly 203 is rotatably connected to the elbow connecting block 206 ; The moving lift column 3 includes a column 301 , a lift drive assembly 302 and a chassis 303 . The column 301 is fixedly installed on the chassis 303 , and the lift drive assembly 302 is slidably installed inside the column 301 . The control system is installed inside the chassis 303 . In this embod...
Embodiment 3
[0067] refer to Figure 4 , is a schematic structural diagram of a mechanical telescopic arm of the robot of the present invention,
[0068] The boom assembly 203, the shoulder connecting block 204, and the elbow connecting block 206 are connected by rotation to form a parallelogram, in which the two sides of the boom assembly 203 can move relative to each other; the forearm assembly 202, the elbow connecting block 206, The wrist connecting block 205 forms a parallelogram through rotational connection, and the two sides of the small arm assembly 202 in the parallelogram can move relative to each other. The telescopic drive assembly 201 is composed of a first drive rod 2012, a second drive rod 2013 and a drive block 2011. The first drive rod 2012, the second drive rod 2013, the boom assembly 203, the forearm assembly 202 and the drive block 2011 are connected by rotation A parallelogram is formed, the driving block 2011 is slidably connected to the shoulder connecting block, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More