

An electromagnetic suction handling and stacking device based on vision and multi-sensing
A multi-sensing and electromagnetic chuck technology, which is applied in the directions of transportation and packaging, unstacking of objects, stacking of objects, etc., can solve the problems of high price, achieve low cost, ensure structural rigidity, and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
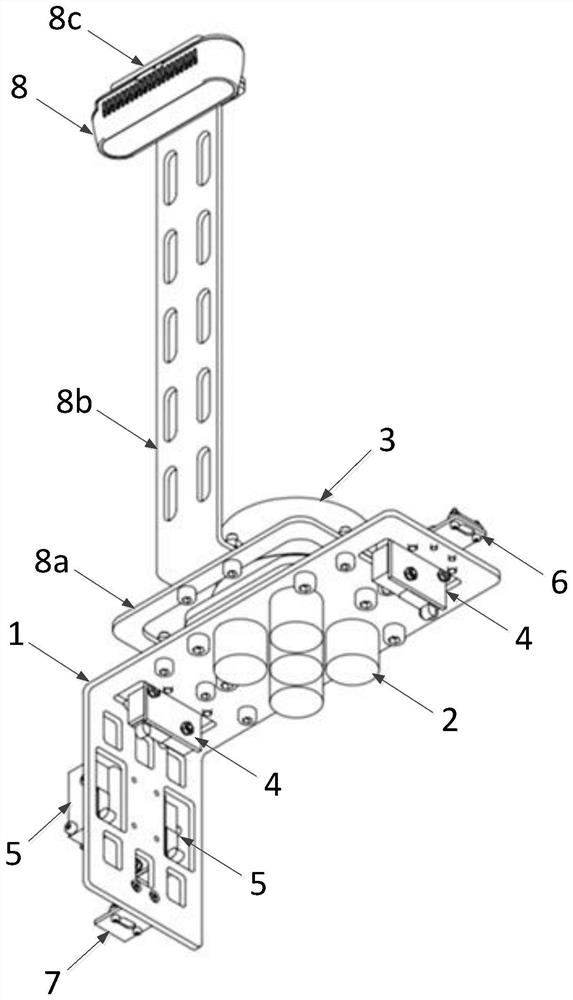
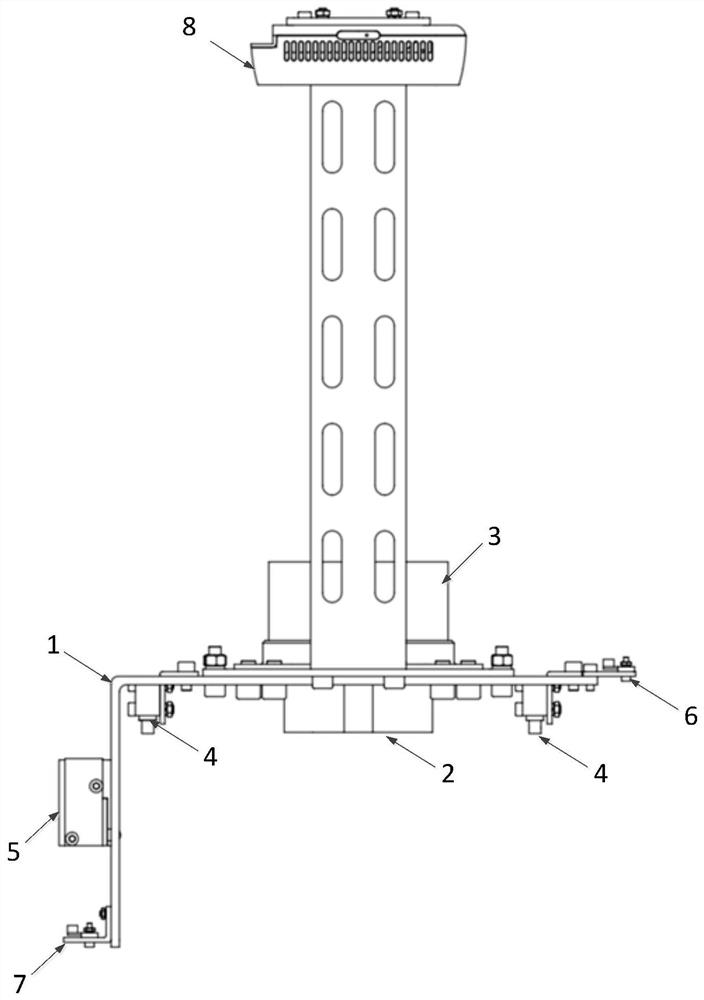
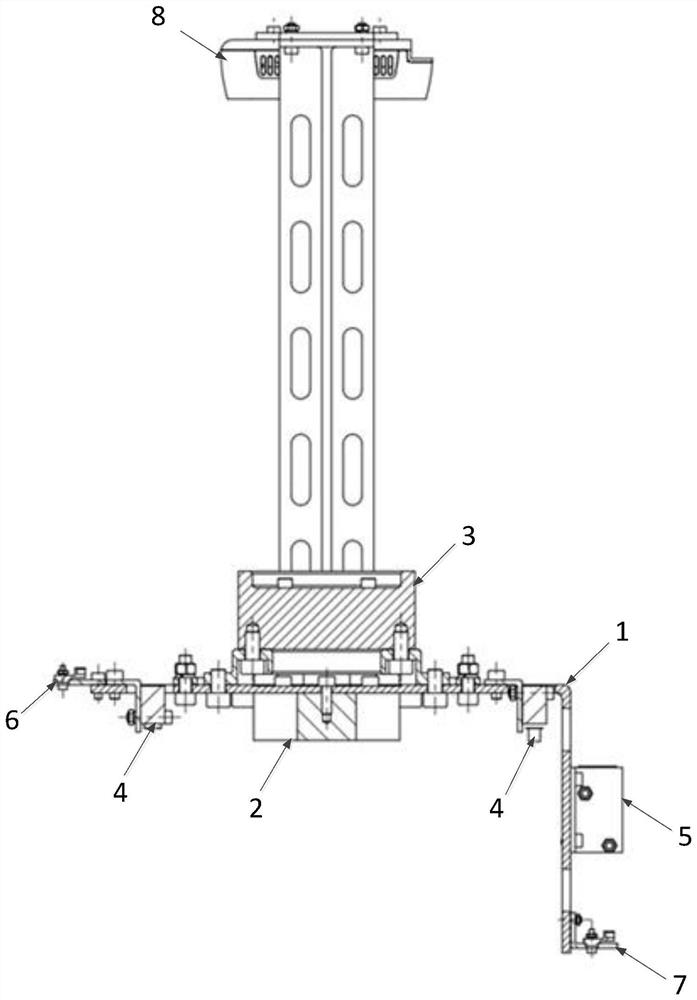
[0028] The present invention is based on the visual multi-sensing electromagnetic suction type handling and stacking device, including a limit mounting plate 1, an electromagnetic chuck 2, a force sensor 3 and a visual multi-sensing system, such as Figure 1~3 shown.
[0029] Wherein, the limit mounting plate 1 is used as the main body installation platform of the handling and stacking device of the present invention. In order to facilitate the handling and stacking operation tasks, it is designed as an L-shaped plate with a top surface and a rear side, and the middle part of the lower surface of the top surface is equipped with an electromagnetic sucker 2. The electromagnetic chuck 2 is used to suck the target article, and the electromagnetic chuck 2 is designed by the present invention to be composed of a plurality of electromagnets. In addition, the numb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More