

Barrier detection and tracking method for port unmanned vehicle
An unmanned vehicle and obstacle detection technology is applied in the field of obstacle detection and tracking of unmanned vehicles in ports. Accurate information, fast running speed and high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0047] A method for obstacle detection and tracking of unmanned vehicles in ports, comprising the following steps:
[0048] S1, point cloud acquisition and superposition:
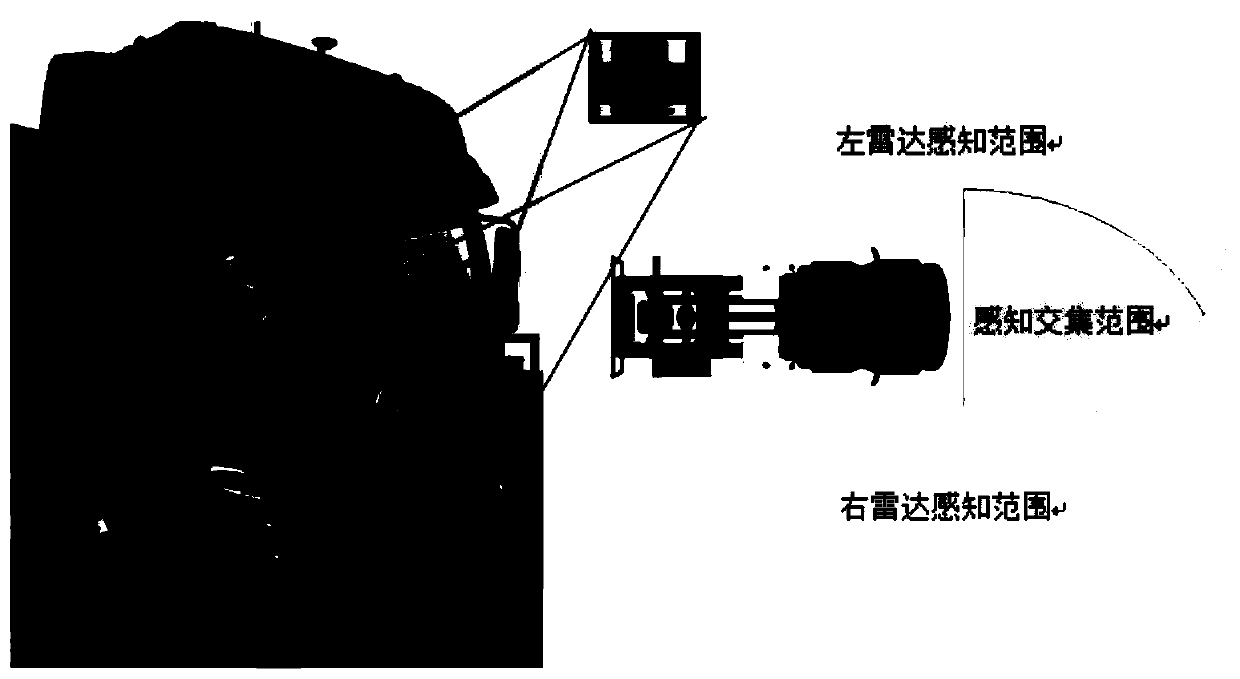
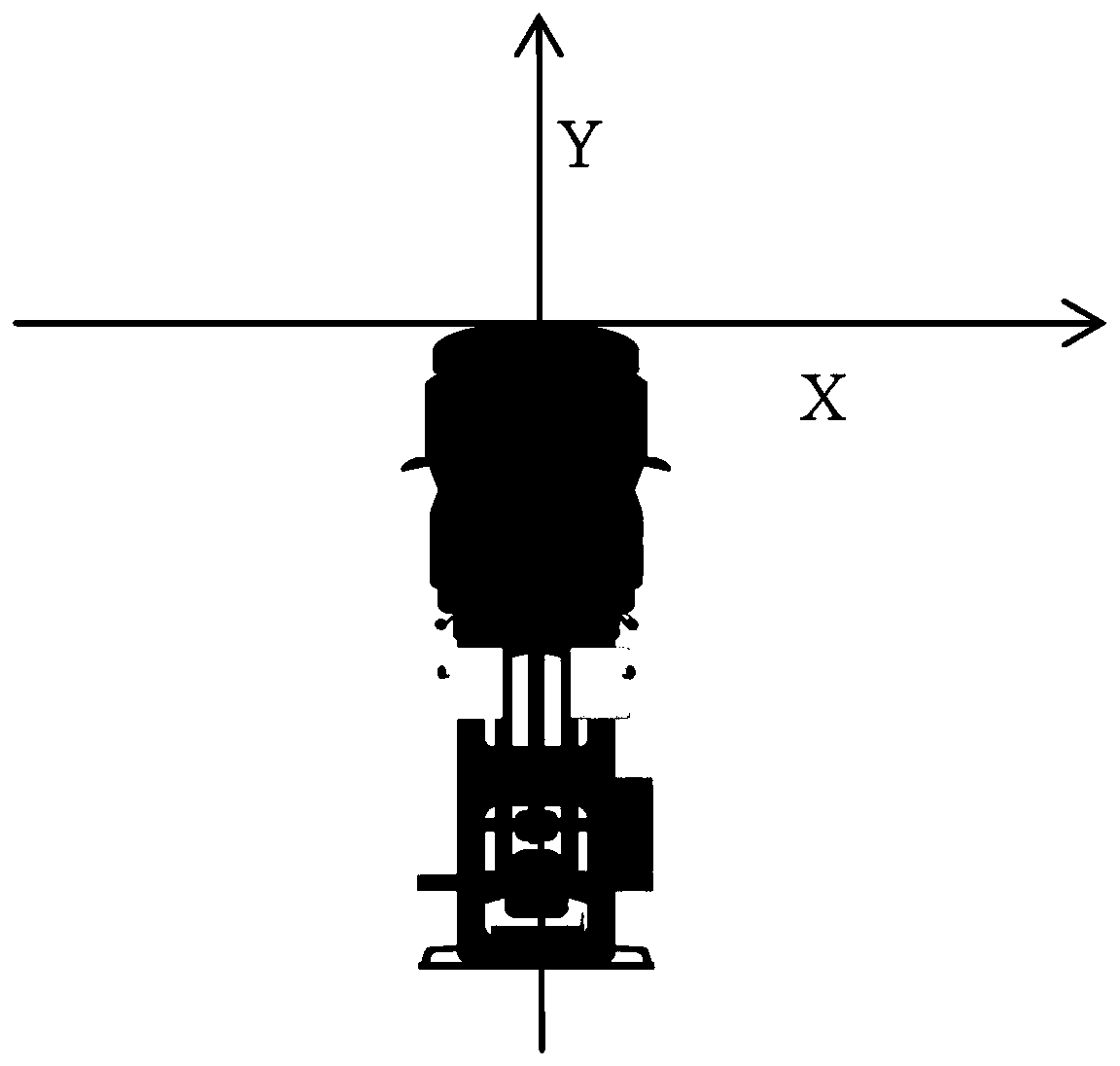
[0049] In this embodiment, two 16-line laser radars are installed on the left and right sides of the front of the car, and their installation positions and sensing ranges are as follows: figure 1 shown. The environmental point cloud coordinates generated by lidar perception are located in the vehicle body coordinate system, which is as follows figure 2As shown, the Y axis points to the front of the vehicle along the center line of the vehicle body, the X axis points to the right side of the vehicle, and the origin is located in the center of the front of the vehicle. The longitude, latitude, heading angle and other information of the location of the car body are obtained through inertial navigation; as the vehicle moves, the environmental point cloud data of two adjacent frames has a heading angle and re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More