

Control method and system of grain leveling robot
A control method and robot technology, applied in the direction of control/adjustment system, control using feedback, controller with specific characteristics, etc., can solve the problems of unstable operation, inability to adapt to robots, poor reliability, etc., and achieve good scraping effect. , Accurate and reliable aisle judgment, accurate judgment of the level of smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
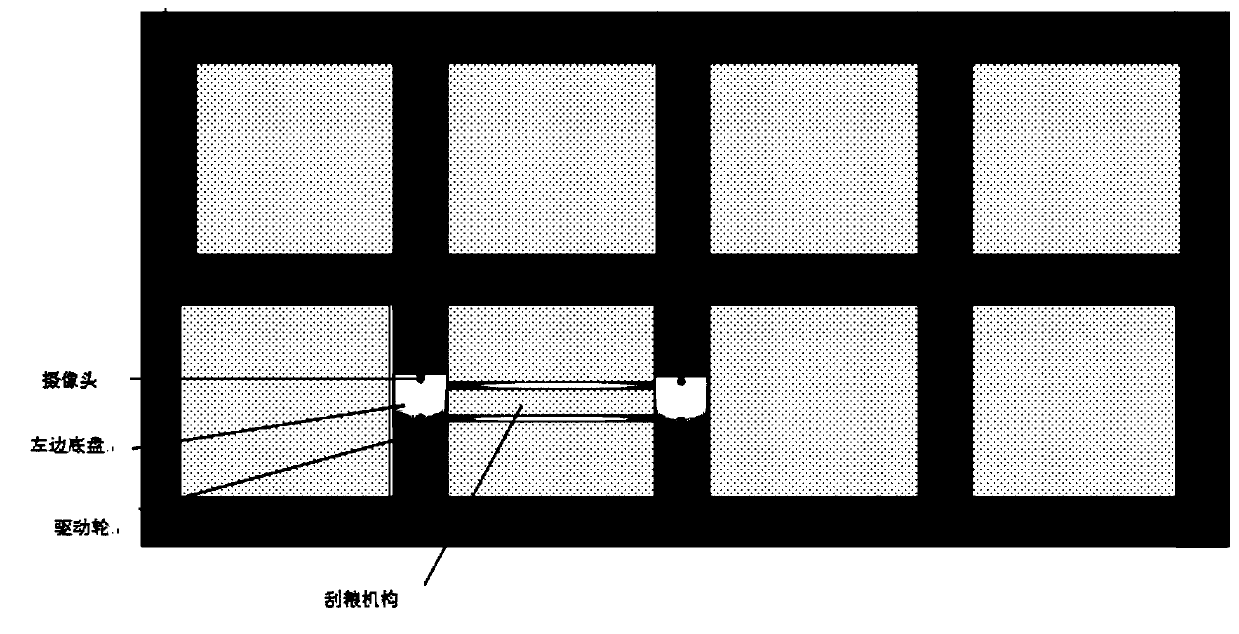
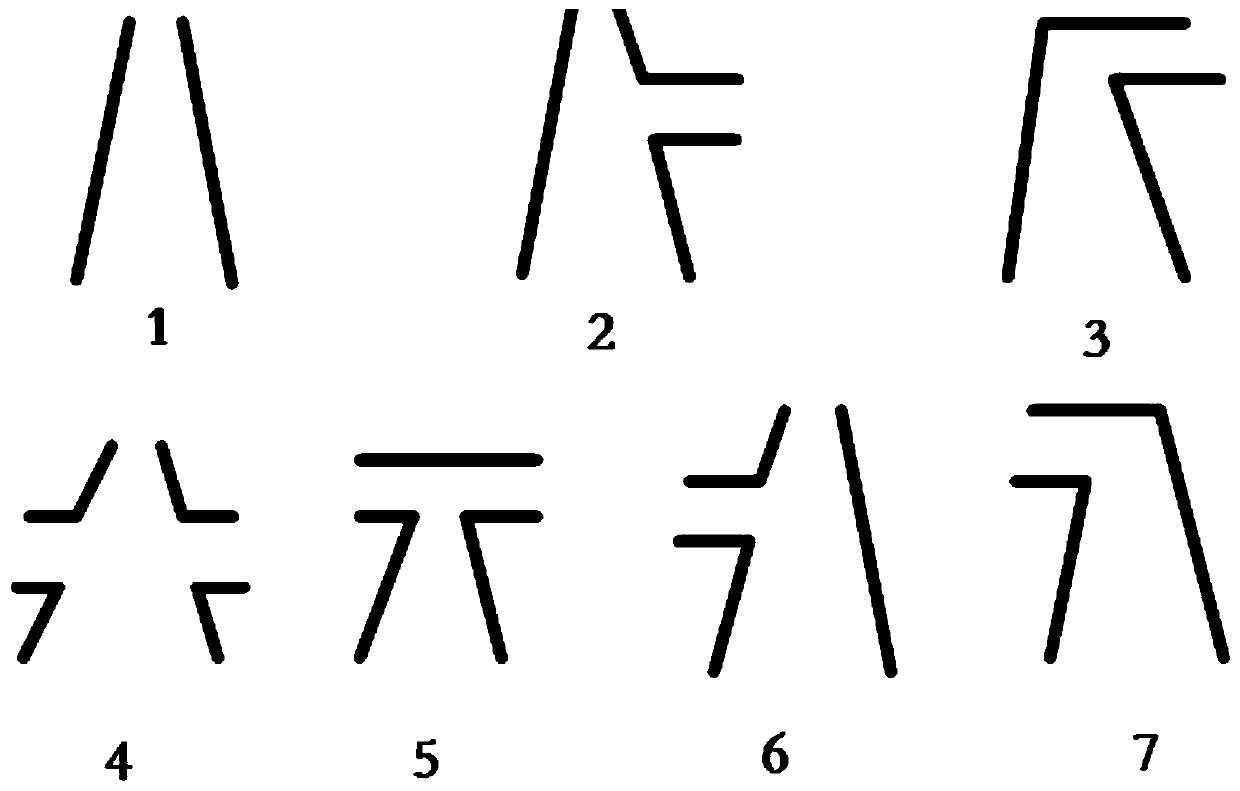
[0065] Schematic diagram of granary, aisle board and flat grain robot figure 2 As shown, the part surrounded by the well shape is the grain, and the part of the well shape is the aisle laid in the granary to facilitate the inspection of the grain situation, and it is also the walking track of the robot. The white part is the robot, and the grain scraping mechanism is dragged by the chassis on both sides to complete the work of leveling the granary. When working, the robot needs to walk safely on the walkway. The robot uses the camera to navigate with the walkway as a reference, and uses the different features at the junction of the walkway as signs for stopping, turning, and turning around. During the grain leveling process, the grain scraping mechanism in the middle will affect the normal movement of the aisle chassis on both sides due to the grain resistance. At this time, it needs to be adjusted to improve the stability of the machine operation and the grain scraping effec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More