

Dynamics modeling method of four-axis mechanical arm
A dynamic modeling, robotic arm technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as inability to achieve results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention provides a dynamic modeling method of a four-axis mechanical arm. In order to make the purpose, technical solution and effect of the present invention clearer and clearer, the present invention will be further described in detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
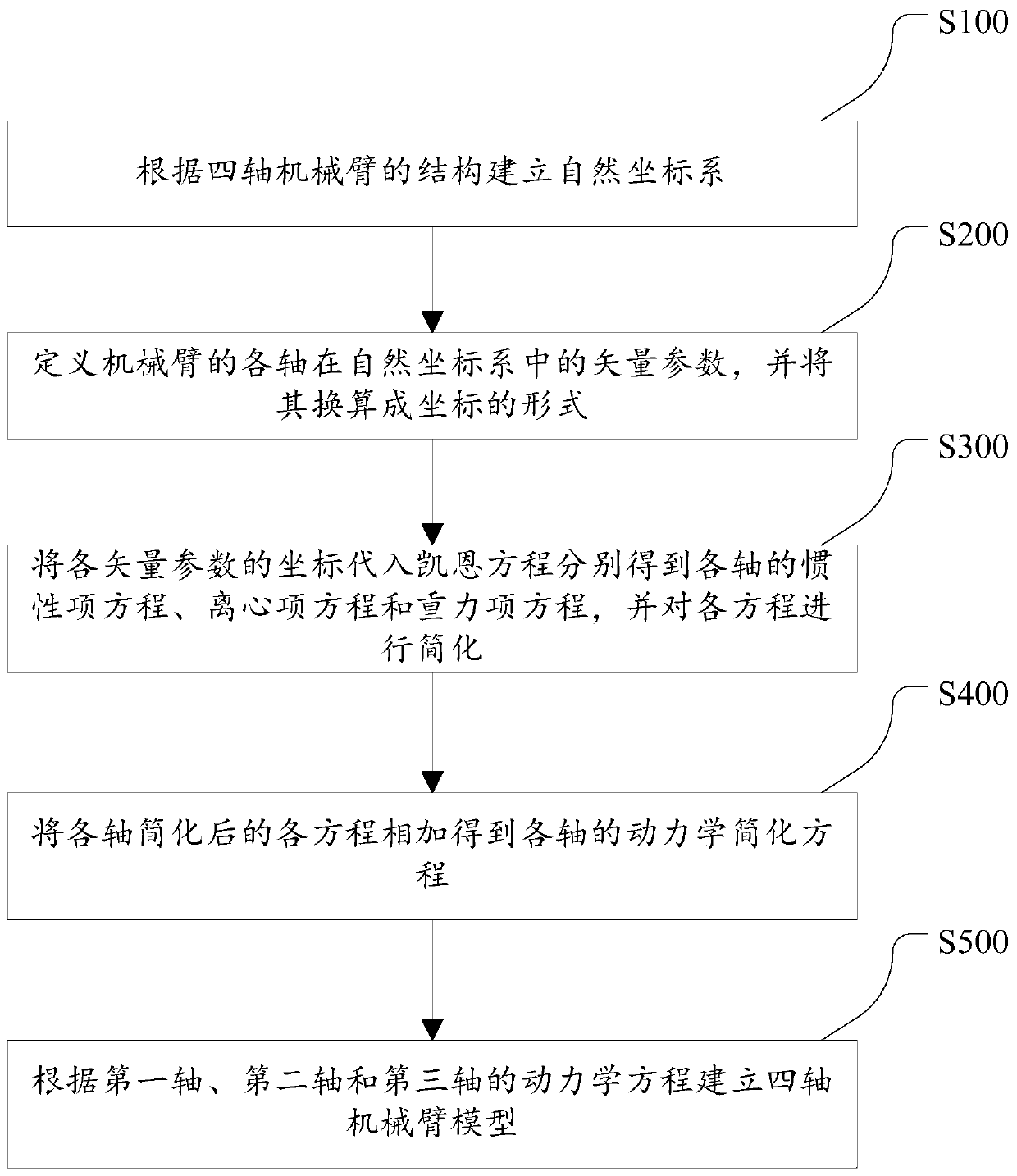
[0080] see figure 1 , a dynamic modeling method of a four-axis mechanical arm provided by the invention, comprising the steps of:
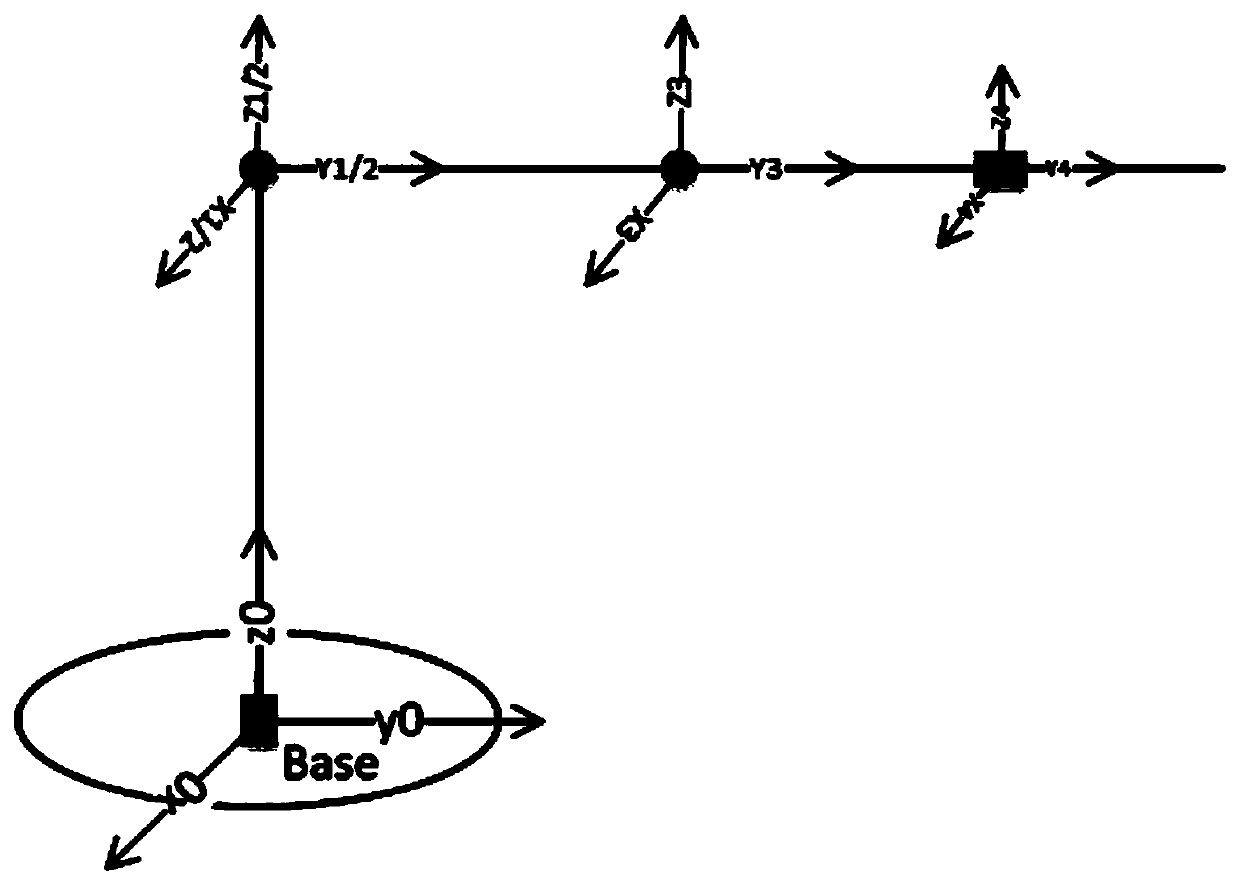
[0081] S100. Establish a natural coordinate system according to the structure of the four-axis mechanical arm;
[0082] S200, define the vector parameters of each axis of the mechanical arm in the natural coordinate system, and convert it into a coordinate form;
[0083] S300, substituting the coordinates of each vector parameter into the Kane equation to obtain the inertial t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More