Depth camera hand-eye calibration method based on CALTag and point cloud information
A hand-eye calibration and depth camera technology, which is applied in image data processing, instruments, calculations, etc., can solve the problems of low accuracy and deviation of coordinate transformation capture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
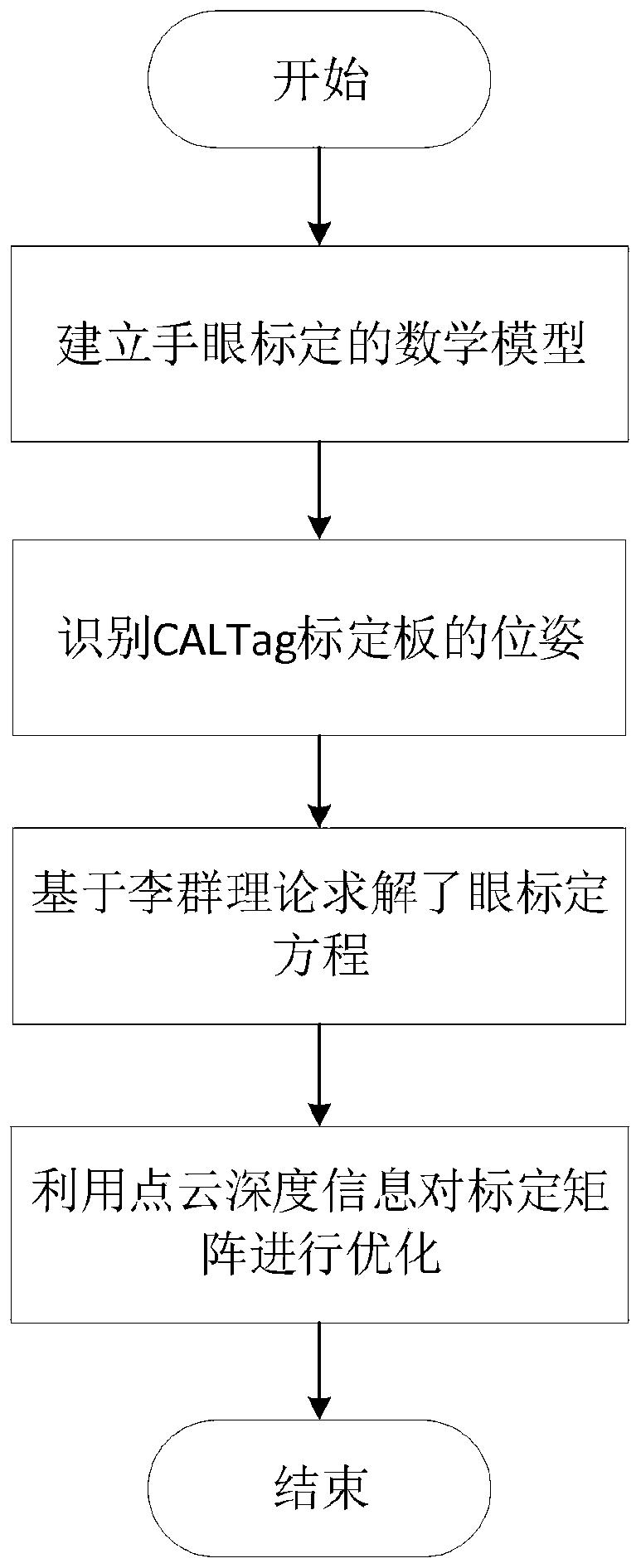
[0061] refer to figure 1 , a hand-eye calibration method for depth cameras based on CALTag and point cloud information, comprising the following steps:
[0062] Step 1), establish the mathematical model of the hand-eye calibration system:
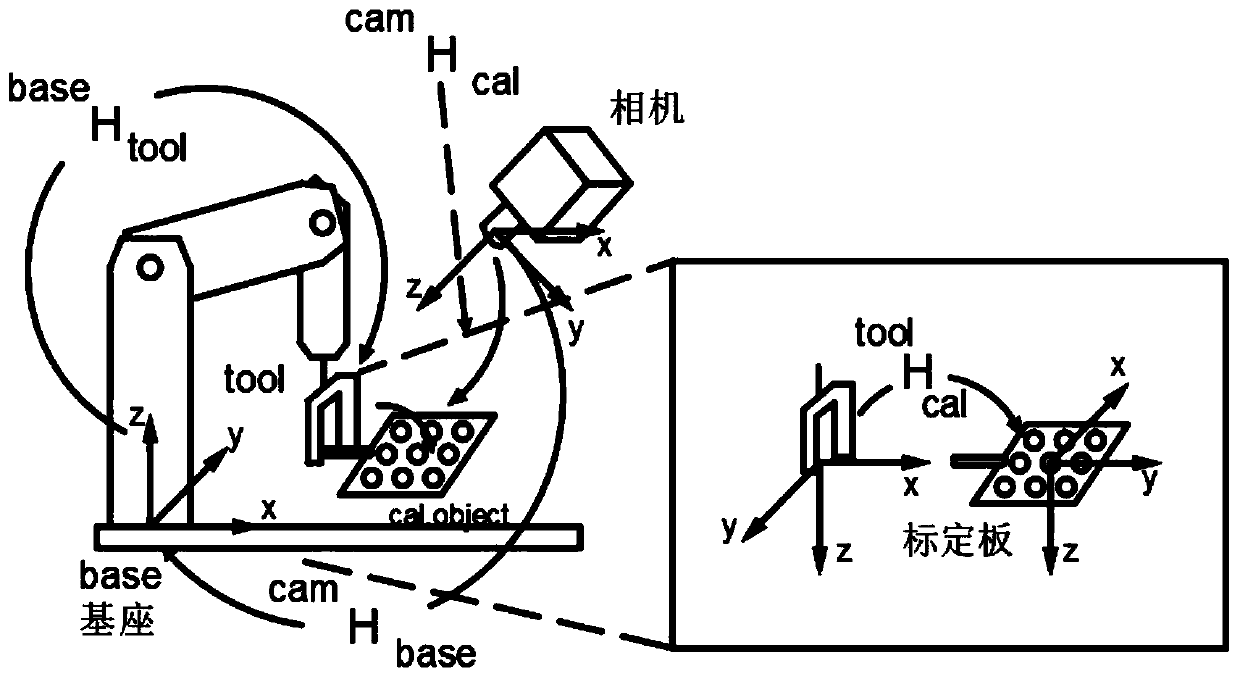
[0063] In the hand-eye calibration system, according to the difference in the mutual orientation relationship between the camera and the robot, the hand-eye relationship can be divided into Eye-in-Hand and Eye-to-Hand models. The Eye-in-Hand model is to install the camera at the end of the robot, so the camera moves with the end during the robot's working process. The camera in the Eye-to-Hand model is fixed, and the camera remains stationary relative to the target while the robot is moving.
[0064] For the hand-eye system with the external fixation of the "eye", that is, the Eye-to-Hand model, a calibration bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More