

Automatic driving decision-making method and system
A technology for automatic driving and decision-making systems, applied in control/regulation systems, motor vehicles, non-electric variable control, etc., can solve problems such as the inability to adopt decision-making models, unpredictable behavior of traffic participants, complex and changeable driving scenarios, etc., to achieve The effect of improving development efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
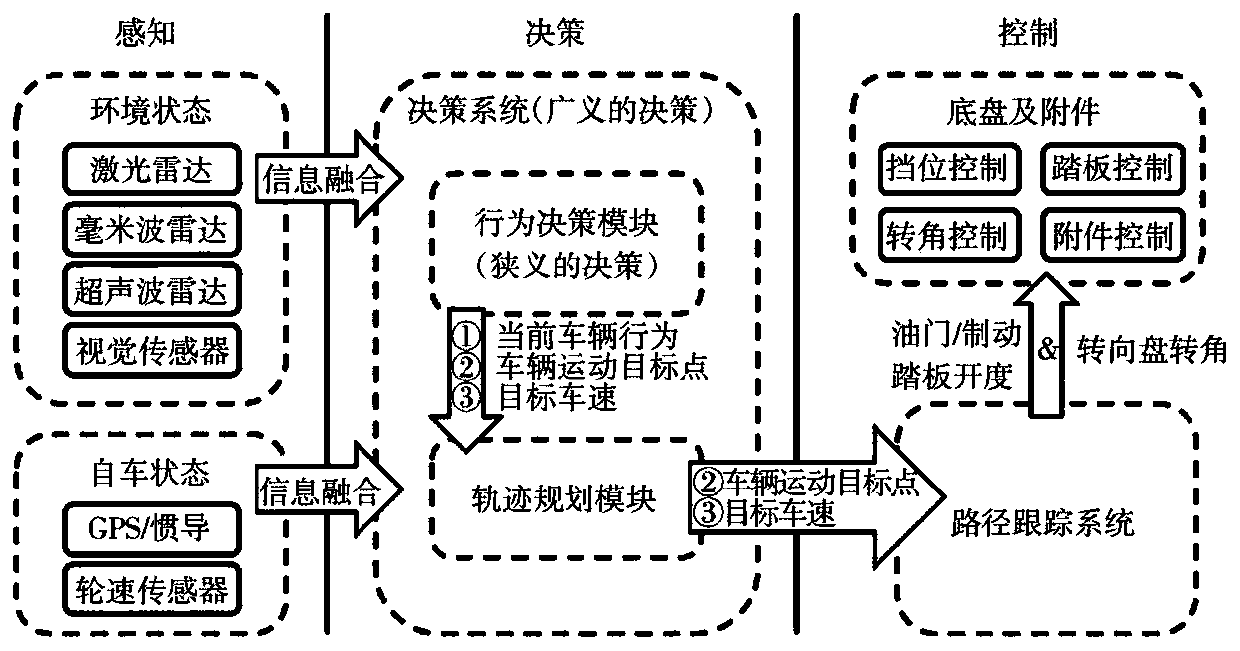
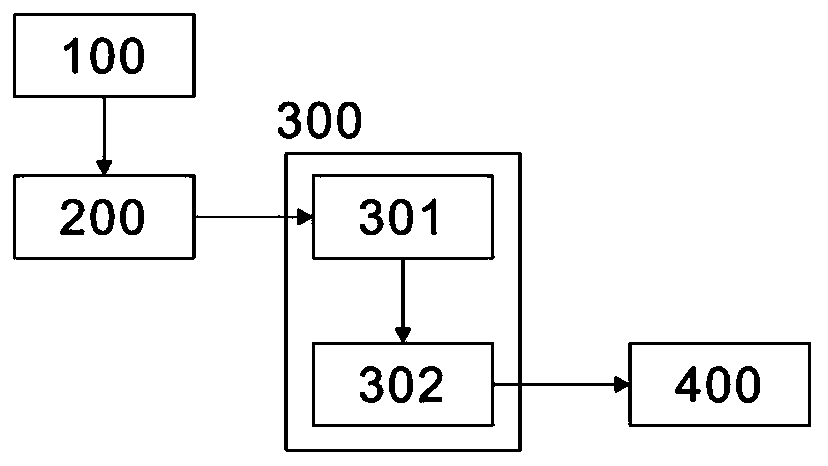
[0033] refer to Figure 1~2 As an illustration, this embodiment proposes an automatic driving decision-making system. As a complex system combining software and hardware, the safe and reliable operation of an unmanned vehicle requires the cooperation of multiple modules such as on-board hardware, sensor integration, perception prediction, and control planning. . Specifically, the decision-making system includes,
[0034] The perception module 100, the perception module 100 can collect the object information of the surrounding environment of the vehicle and the state information of the vehicle itself; the environment state of the perception module 100 includes the environment information collected by laser radar, millimeter wave radar, ultrasonic radar and visual sensor. The status information of the vehicle itself includes information collected by positioning / inertial navigation and wheel speed sensors.
[0035] The prediction module 200, the prediction module 200 is connect...
Embodiment 2
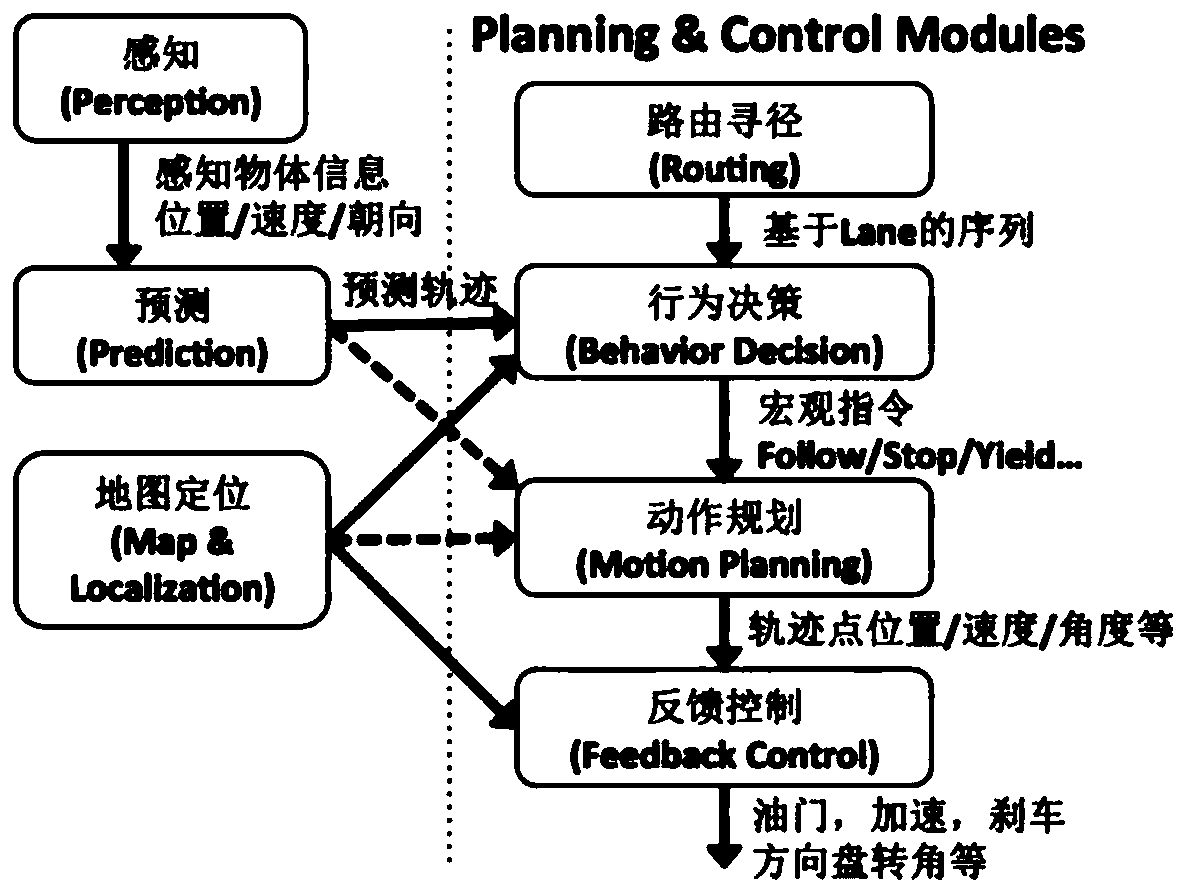
[0041] refer to image 3 Based on the above-mentioned system, this embodiment proposes an automatic driving decision-making method, which can be applied to the above-mentioned system, so that each module can perform its own duties and focus on solving the problems at this level, thus improving the development of the entire complex software system efficiency. Specifically, the following steps are included,
[0042] The perception module 100 collects object information in the surrounding environment of the vehicle;
[0043] Object information is input into the calculation of the prediction module 200 to generate a predicted trajectory;
[0044] Decision-making module 300 receives trajectory points for predicting trajectory output decisions;
[0045] The feedback control module 400 digests the track points, and controls the vehicle to execute the track points.
[0046] Among them, a series of control input increments in the control time domain are obtained in each control cyc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More