

Underwater robot support and underwater robot
The technology of an underwater robot and a bracket plate is applied in the directions of underwater ships, underwater operation equipment, motor vehicles, etc., which can solve the problem of low shooting accuracy, and achieve the effects of convenient carrying, simple assembly process, and enlarged shooting range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
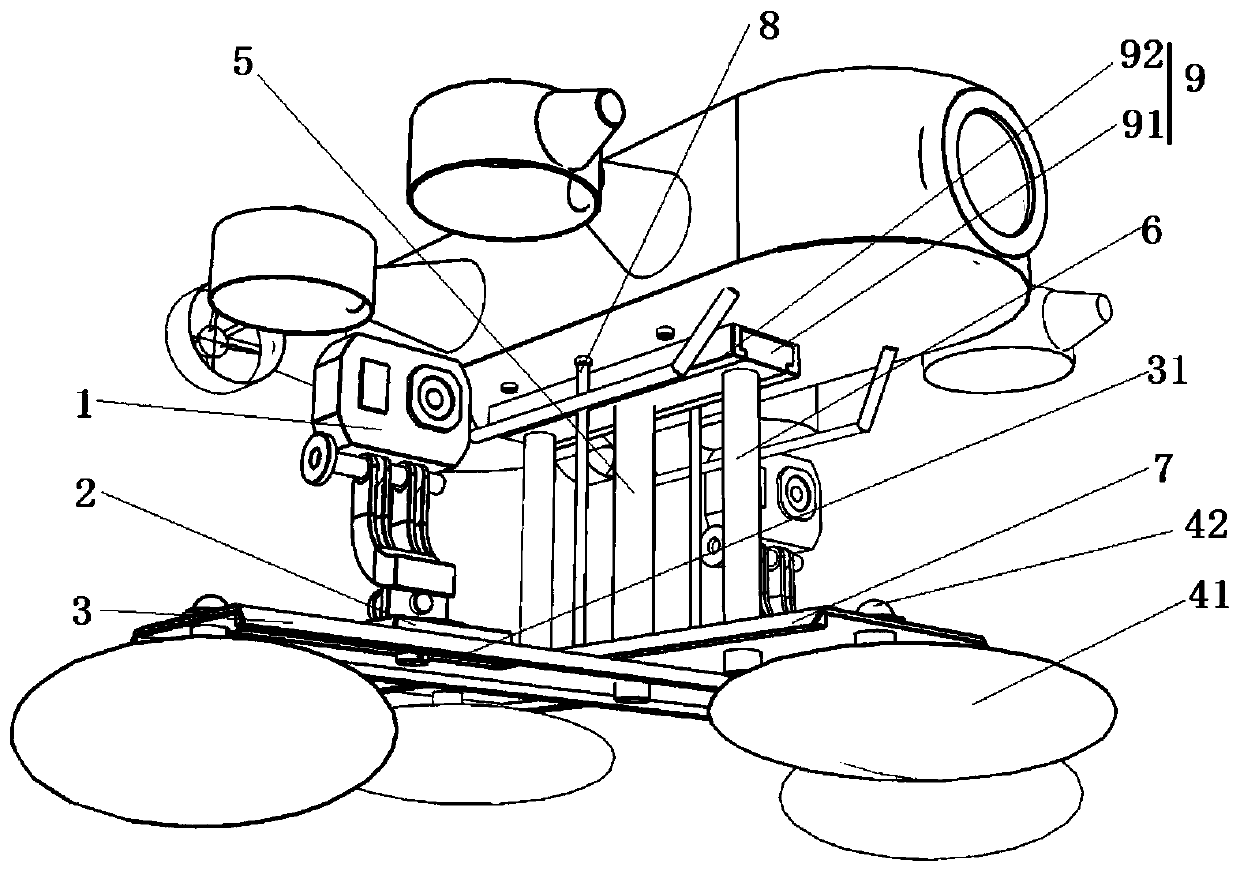
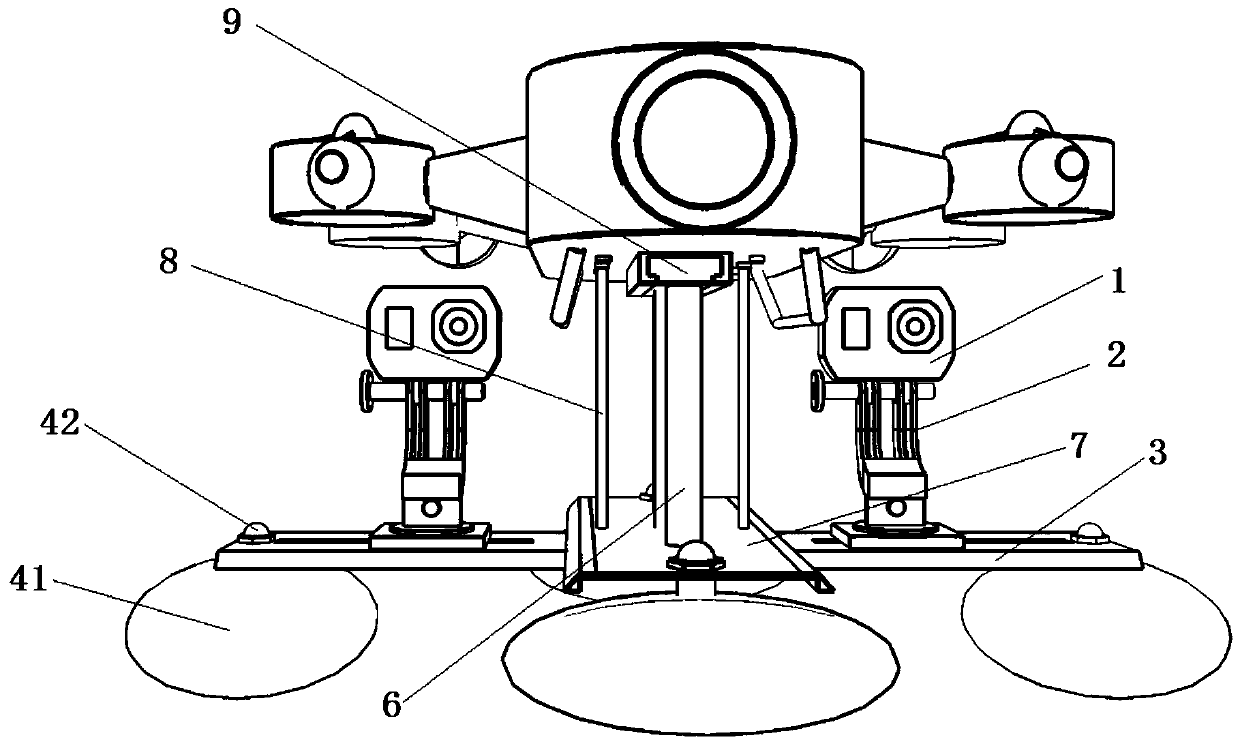
[0026] Such as Figure 1 to Figure 5 As shown, the underwater robot support includes a first pillar 5, the top of the first pillar 5 is fixedly connected to the underwater robot, the bottom of the first pillar 5 is fixedly connected to the first support plate 3, and the two ends of the first support plate 3 are respectively The binocular camera 1 is slidably arranged, and a balance device 4 is fixed on the first support plate 3 through a connecting piece 42.
[0027] Specifically, the balancing device 4 includes four floating balls 41 arranged in four directions: front, rear, left, and right, and the floating balls 41 are fixedly connected to the first support plate 3. The floating ball 41 has a variety of different models. The floating ball 41 can be detachably installed to facilitate the replacement of different models of the floating ball 41 to match and balance the weight of the bracket and the weight of the binocular camera 1 of different models, so that the underwater robot ...
Embodiment 2
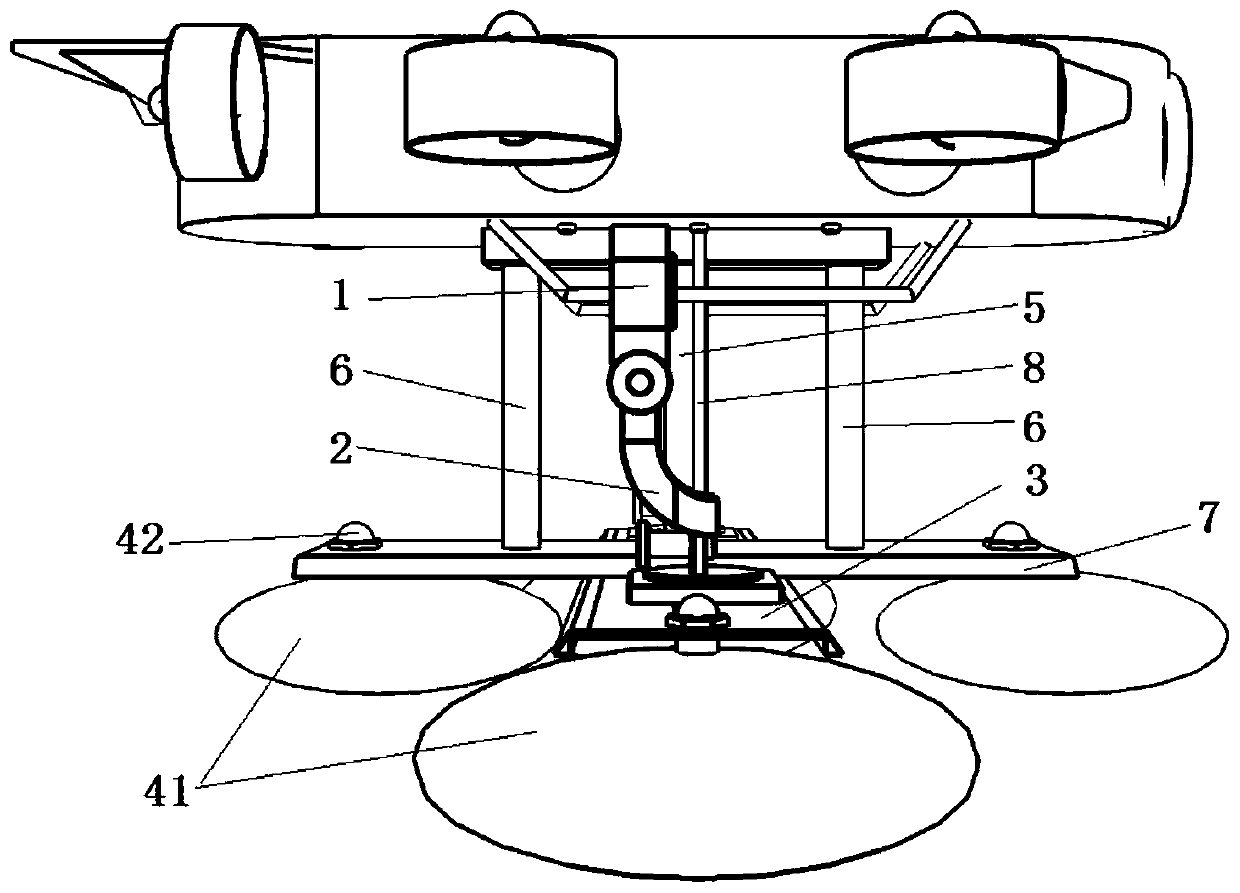
[0036] Such as Figure 6 to Figure 11 , Underwater robot support, including the first pillar 5, the top of the first pillar 5 is fixedly connected to the underwater robot, the bottom of the first pillar 5 is fixedly connected to the first support plate 3, and the two ends of the first support plate 3 are slidably arranged For the binocular camera 1, a balancing device 4 is fixed on the first support plate 3 through a connecting piece 42.
[0037] Specifically, the balancing device 4 includes four floating balls 41 arranged in four directions: front, rear, left, and right, and the floating balls 41 are fixedly connected to the first support plate 3. The floating ball 41 has a variety of different models. The floating ball 41 can be detachably installed to facilitate the replacement of different models of the floating ball 41 to match and balance the weight of the bracket and the weight of the binocular camera 1 of different models, so that the underwater robot can be The suspensi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More