

Box body sorting method and system based on RGB-D camera
A box and camera technology, applied in image analysis, image data processing, instruments, etc., can solve the problems of actuator execution deviation, inaccurate calibration results, poor estimation accuracy, etc., to achieve improved accuracy, good real-time performance, and no data. The effect of deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0066] The present invention will be described in detail below with reference to the accompanying drawings and examples.
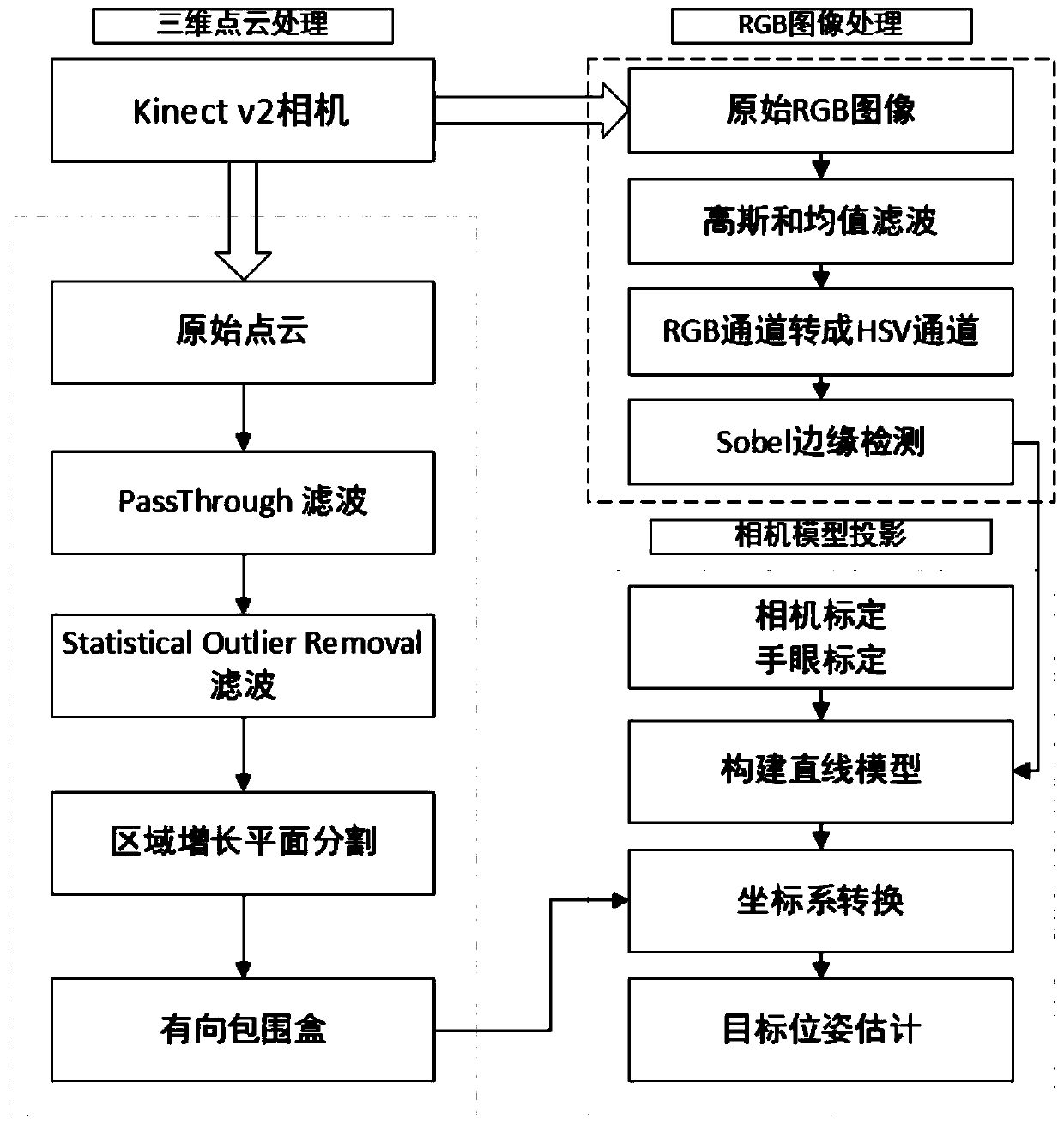
[0067] The box sorting method based on the RGB-D camera of the embodiment of the present invention, such as figure 1 shown, including the following steps:
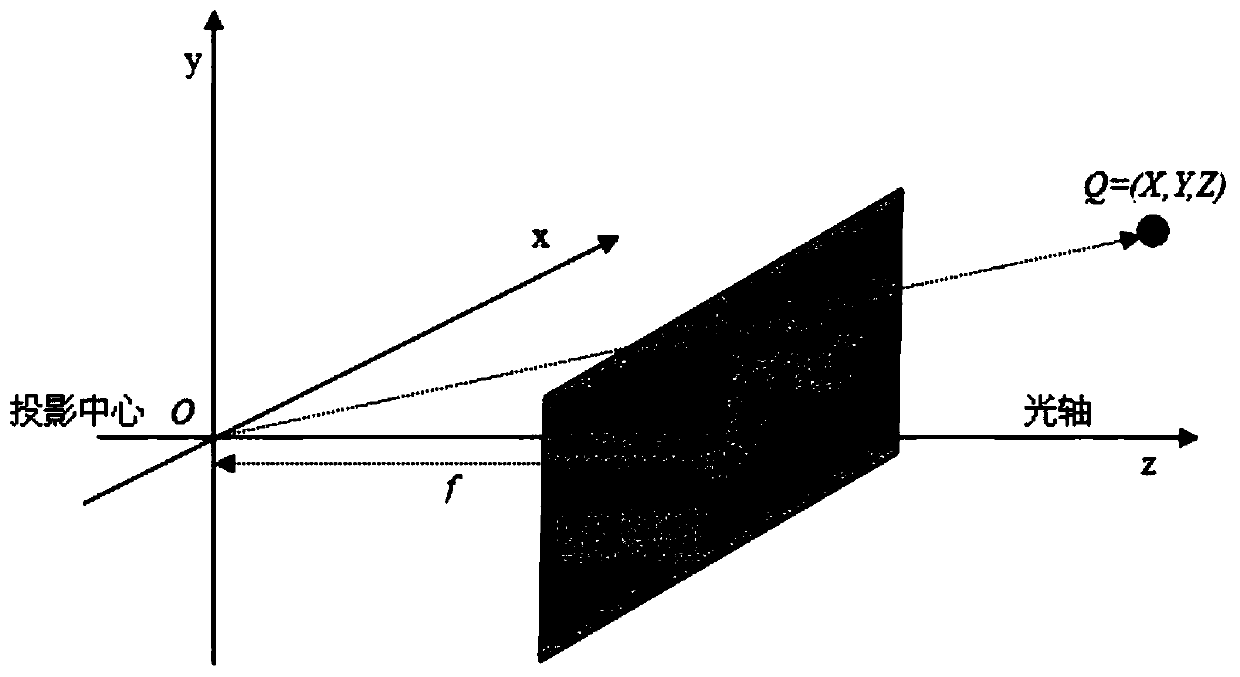
[0068] Step 1, after respectively calibrating the color camera and the depth camera of the RGB-D camera 4, according to the determined parameters of the color camera and the depth camera, calculate the coordinate conversion relationship between the color camera and the depth camera;
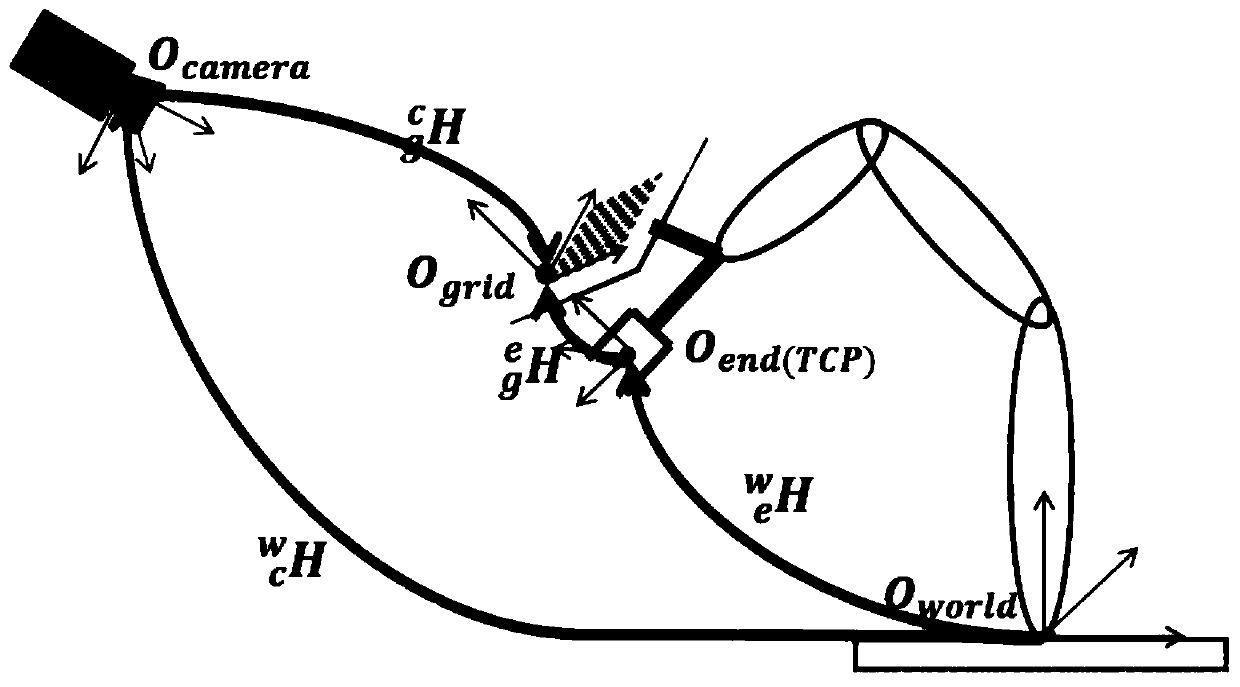
[0069] Step 2: After fixing the calibration plate at the end of the robotic arm 2 and fixing the RGB-D camera 4 on the area above the conveyor belt 1, use the Tsai algorithm for hand-eye calibration to obtain the color camera in the RGB-D camera 4 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More