

Multi-population chaos grey wolf algorithm-based multi-unmanned aerial vehicle cooperative path planning method
A route planning and multi-UAV technology, applied in navigation calculation tools, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as poor development ability and local optimum, and achieve improved search accuracy and The effect of stability, fast convergence speed and less adjustment parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
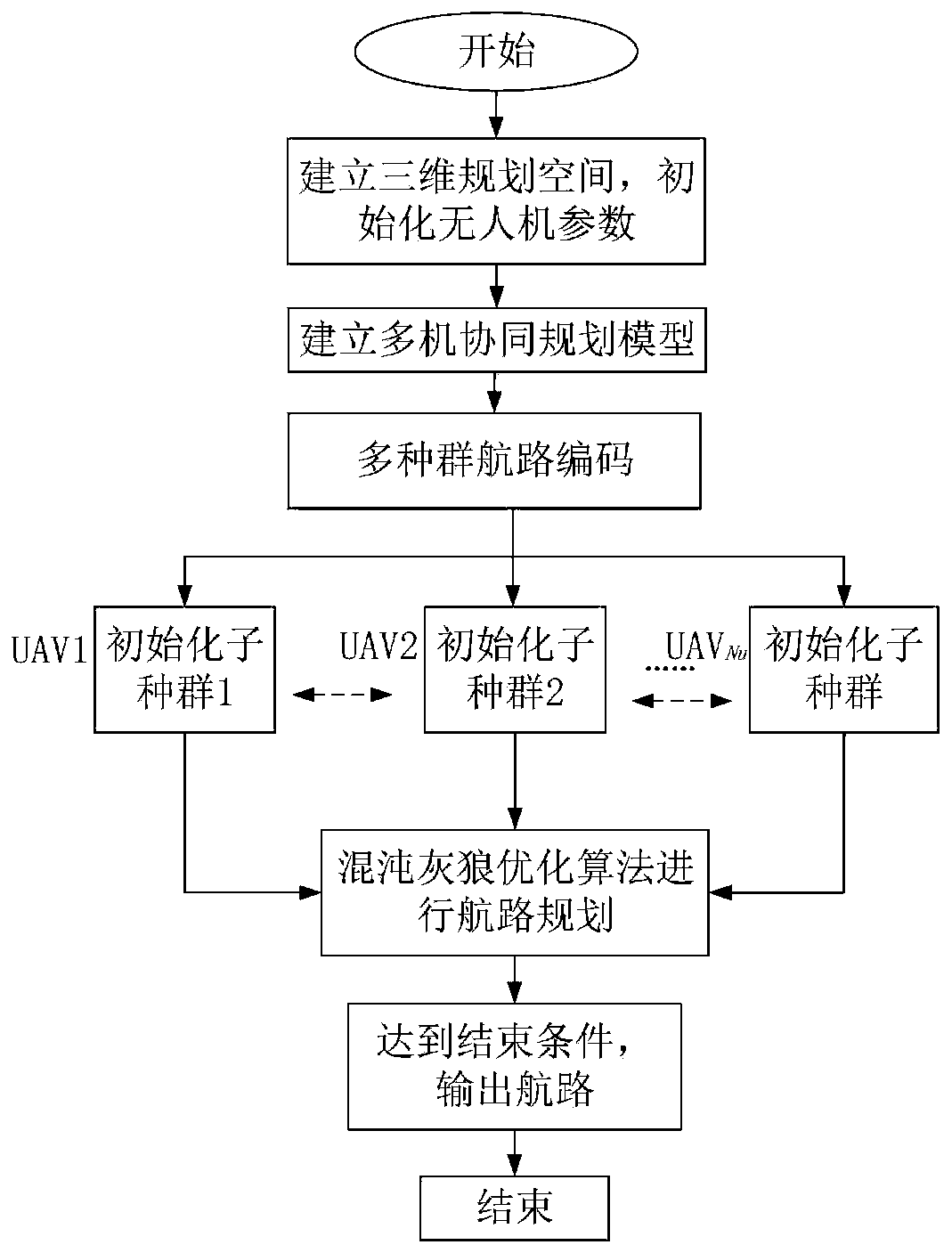
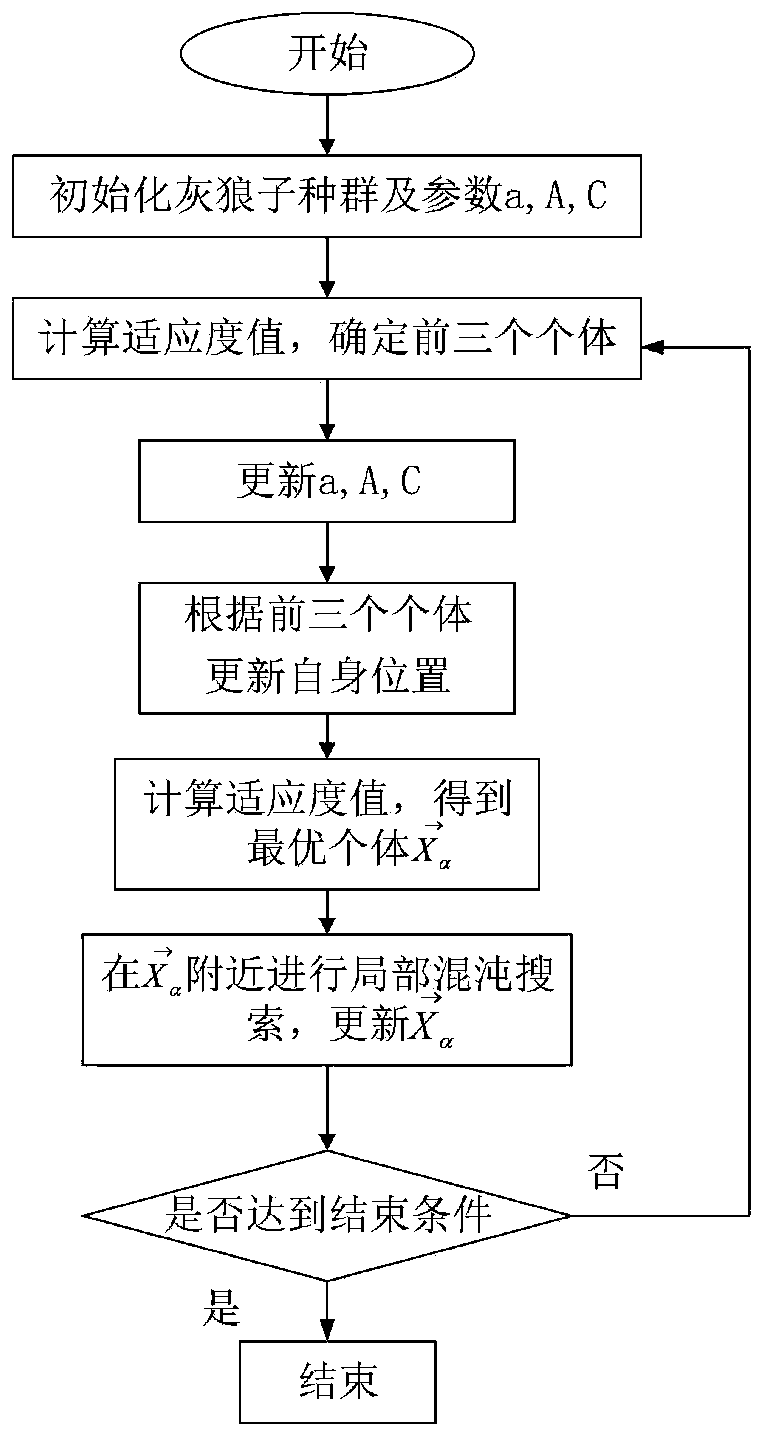
[0052] Such as figure 1 , 2 As shown, a multi-UAV collaborative route planning method based on the multi-population chaotic gray wolf algorithm includes the following steps:
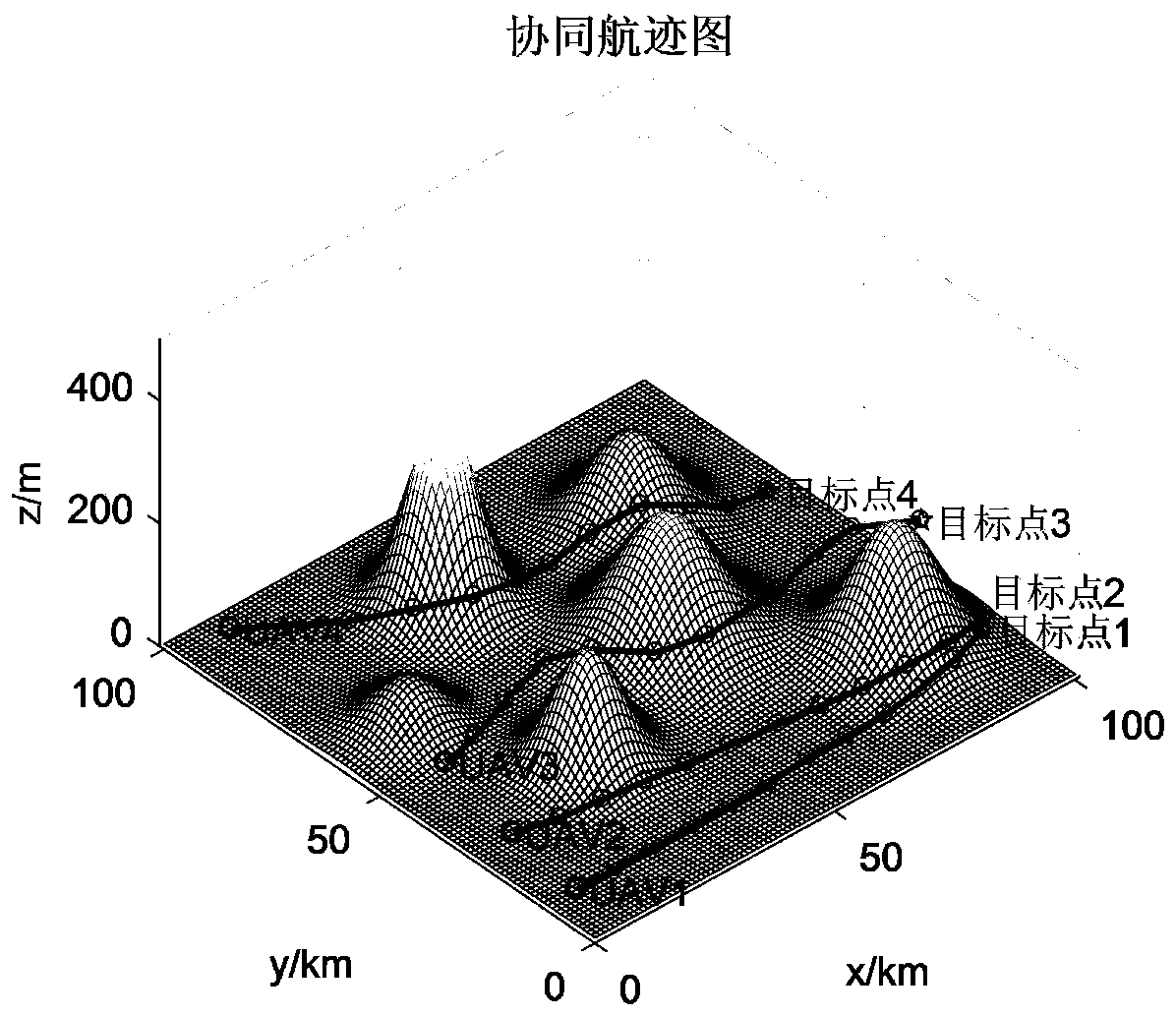
[0053] Step 1: Establish a three-dimensional environment for multi-UAV route planning, initialize the number of UAVs to N, the starting point S and target point E of each UAV, the number of waypoints Dim, and the flight speed range of UAVs [v min ,v max ]. Taking the mountainous background as the task environment, the digital elevation model (DEM) of the mountainous area is established by using random functions to simulate mountain peaks and threat areas. In this planning space, the UAV route is represented as multiple three-dimensional track nodes {S,P 1 ,P 2 ,...,P n ,E}, track node denoted as P i =(x i ,y i ,z i ), connect the track nodes in turn to obtain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More