

Back-step self-adaptive fuzzy sliding-mode control method of under-actuated aerial autonomous underwater vehicle (AUV) under composite disturbance
An adaptive fuzzy and backstepping sliding mode technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of not considering the uncertainty of external disturbance parameters, ignoring the dynamic characteristics of underactuated AUVs, etc. , to achieve the effect of good composite interference, high stability and precise tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
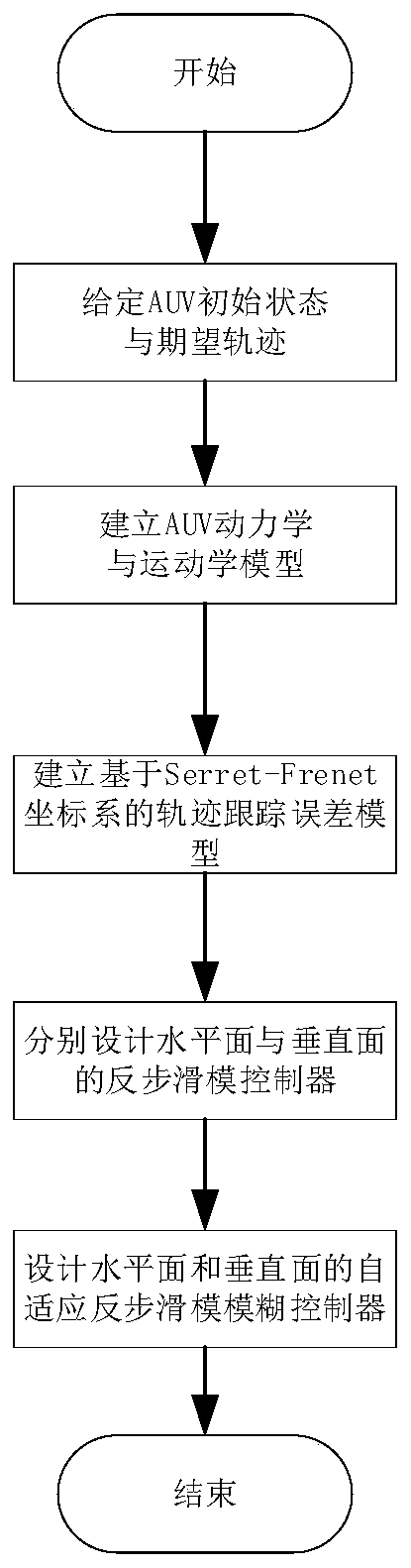
[0088] Implementation 1: If figure 2 It is a flow chart of adaptive backstepping sliding mode fuzzy control, and its implementation process is:
[0089] Step 1, establishing the dynamics and kinematics models of the vertical and horizontal planes of the AUV;
[0090] Step 2, establishing a trajectory tracking error model based on the Serret-Frenet coordinate system;
[0091] Step 3: Using the error variable and dynamic model described above, construct a backstepping sliding mode control controller for the horizontal plane and the vertical plane respectively, and obtain the controller outputs under the horizontal plane and the vertical plane respectively, so as to realize the underactuation under the condition of no disturbance AUV trajectory tracking control;
[0092] Step 4, adding an adaptive fuzzy control system to the trajectory tracking controller under the aforementioned disturbance-free control, so as to realize the identification and suppression of compound disturba...
Embodiment 2
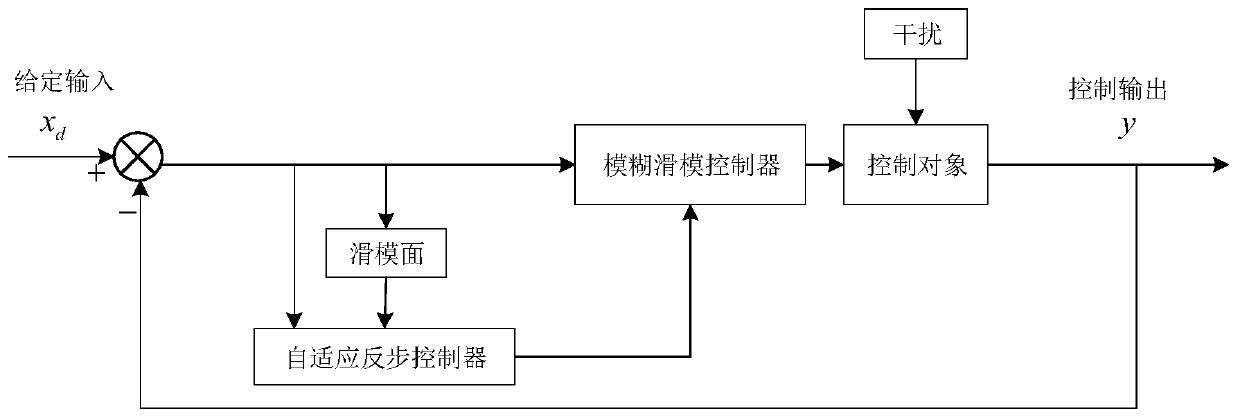
[0093] Implementation 2: If image 3 It can be seen that it mainly includes fuzzy sliding mode controller, adaptive backstepping controller and control object. The present invention establishes the kinematics and dynamics model of AUV:
[0094] The kinematic equation of the horizontal plane is:
[0095]
[0096] The kinematic equation of the vertical plane is:
[0097]
[0098] The horizontal dynamic equation is:
[0099]
[0100] The dynamic equation of the vertical plane is:
[0101]
[0102] Then the tracking error model is established in the Serret-Frenet coordinate system:
[0103] The tracking error equation of AUV horizontal plane trajectory is:
[0104]
[0105] The AUV vertical surface trajectory tracking error equation is:
[0106]
Embodiment 3
[0107] Implementation 3: Design an adaptive backstepping controller:
[0108] Horizontal plane backstepping sliding mode longitudinal velocity controller:
[0109]
[0110] Horizontal plane backstepping sliding mode heading controller
[0111]
[0112] Vertical Backstepping Sliding Mode Pitch Angle Controller
[0113]
[0114] Apply this controller to the control object in Implementation 1, and get Figure 4 , Figure 5 . Figure 4 is the circular trajectory tracing graph in the horizontal plane, Figure 5 Trace the graph for a sinusoidal trajectory in the vertical plane. The simulation assumes that the initial conditions are the same, regardless of external interference, and the expected speed of the AUV is u d =1m / s, respectively select a circle and a sinusoidal curve as the trajectory to be tracked, and the initial state of the AUV is v(0)=r(0)=0, u(0)=0.08m / s. Depend on Figure 4 and Figure 5 It can be seen that both the horizontal plane trajectory track...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More