

Workpiece pose rapid high-precision estimation method and apparatusbased on point cloud data
A point cloud data and workpiece technology, which is applied in the field of fast and high-precision estimation of workpiece pose based on point cloud data, can solve the problems of inability to meet the requirements of robot grasping and assembly accuracy, expensive computing equipment, and low pose estimation accuracy. , to achieve the effect of fast time, wide application and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In the following, the concept, specific structure and technical effects of the present invention will be clearly and completely described in conjunction with the embodiments and the drawings, so as to fully understand the objectives, solutions and effects of the present invention.
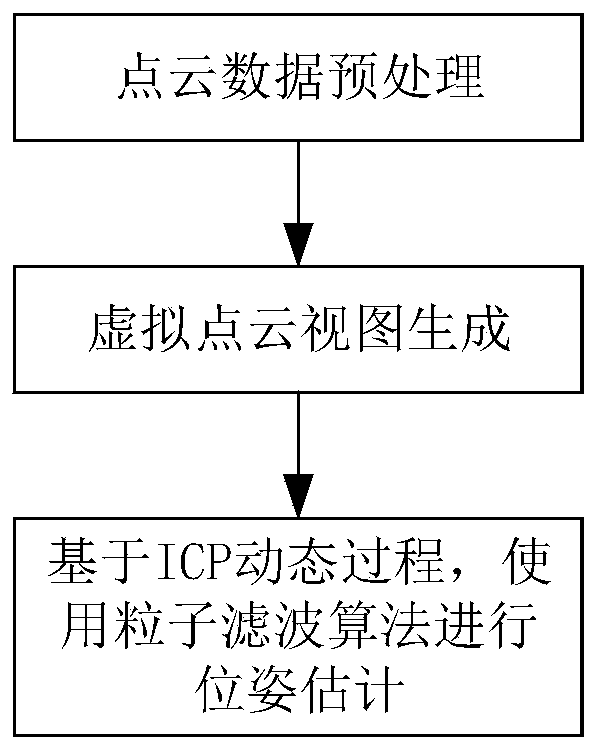
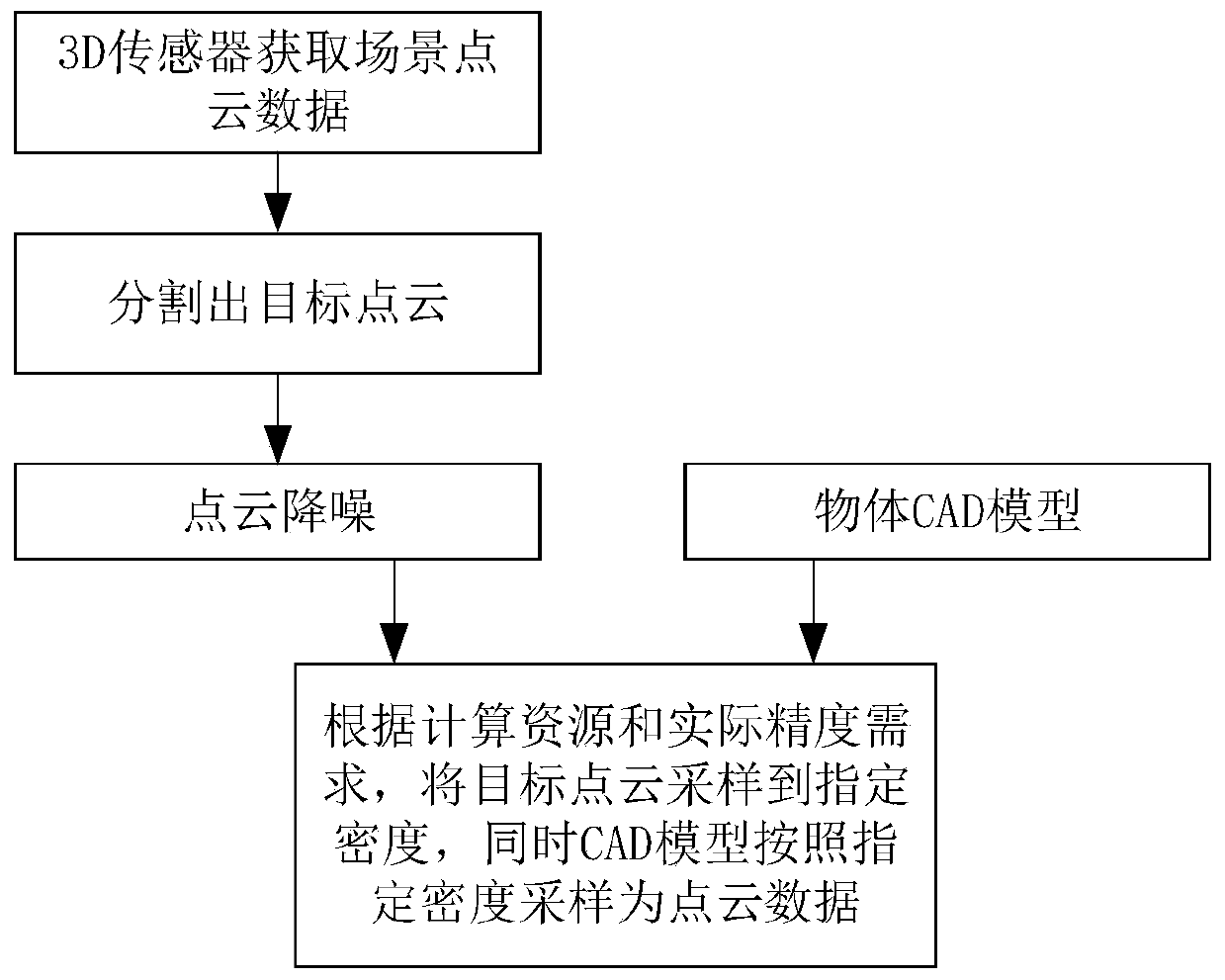
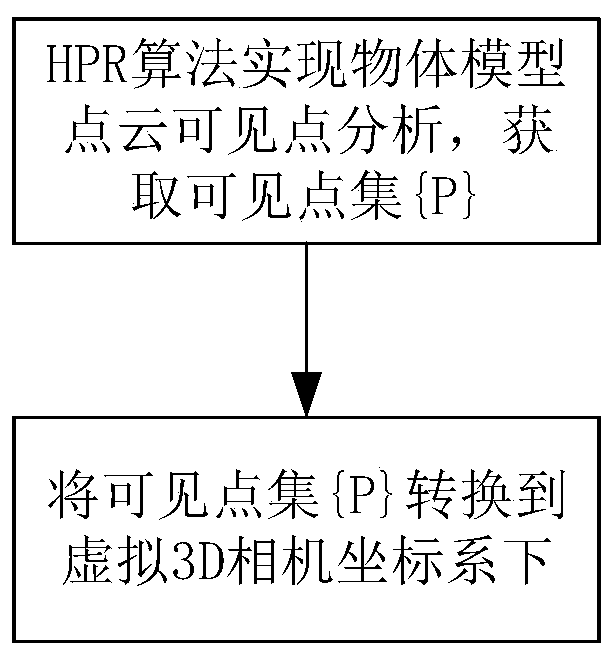
[0063] This article mainly discloses a method for estimating the pose of a workpiece based on a point cloud, which is mainly used to solve the problem of workpiece pose estimation in the field of automated assembly, especially in the field of small parts assembly. Such as figure 1 As shown, the method is divided into three steps: point cloud data preprocessing, point cloud virtual view extraction and pose estimation. The point cloud data preprocessing is mainly to segment the object point cloud acquired by the sensor as the target point cloud; convert the CAD model of the object into point cloud data, which is used to generate the point cloud view of the virtual 3D camera. Point cloud virtual ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More