

Object 6D posture prediction method based on RGB image and coordinate system transformation
A RGB image and prediction method technology, applied in image enhancement, image analysis, image data processing, etc., can solve problems such as poor adaptability of models to complex scenes, difficult labeling of data sets, complex lighting conditions, etc., to avoid the problem of universal angle, Avoid parameter waste and avoid the effect of mutual restriction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with drawings and embodiments.
[0044] The implementation device of the method of the present invention includes a Logitech camera, an object to be tested, and a computer equipped with a GPU. The object to be tested is placed on the stage, and the Logitech camera is fixed at a height of half a meter from the stage and half a meter away from the object to be tested. The camera is aimed at the object and connected to the computer.
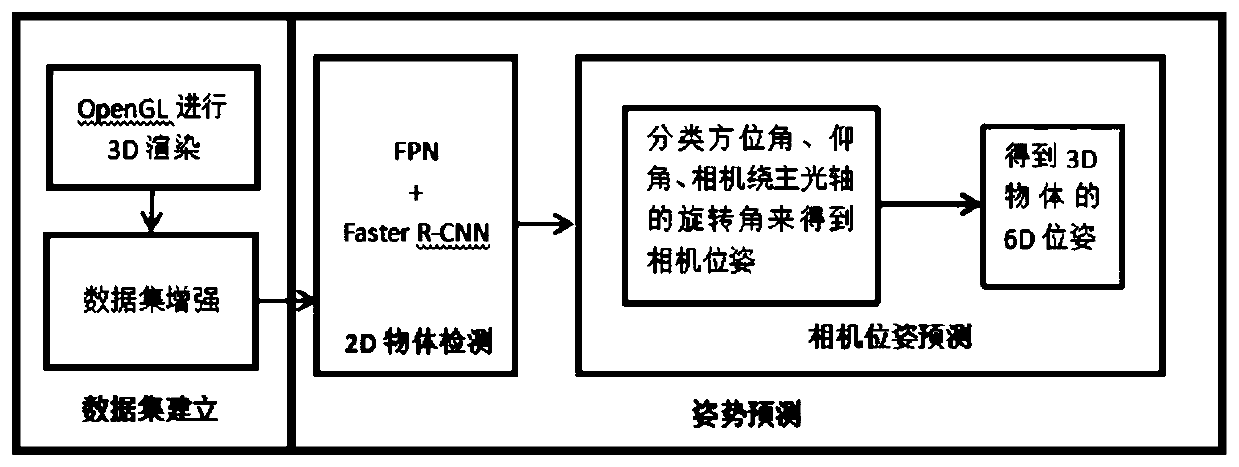
[0045] Such as figure 1 Shown, the embodiment of the inventive method is as follows:
[0046] In the first step, use a 3D scanner to create a 3D point cloud model and a surface map of a known object. Use OpenCV to calibrate the camera internal parameters of the Logitech camera (model: C270), set the obtained camera internal parameters as the internal parameters of the camera in OpenGL, and use OpenGL to render the scanned 3D model. The rendered image resolution does not ne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More