

Industrial robot visual recognition positioning grabbing method, computer device and computer readable storage medium
An industrial robot, visual recognition technology, applied in computer parts, computing, character and pattern recognition, etc., can solve the problems of low positioning stability and accuracy, and weak anti-interference, so as to improve the accuracy and improve positioning. The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
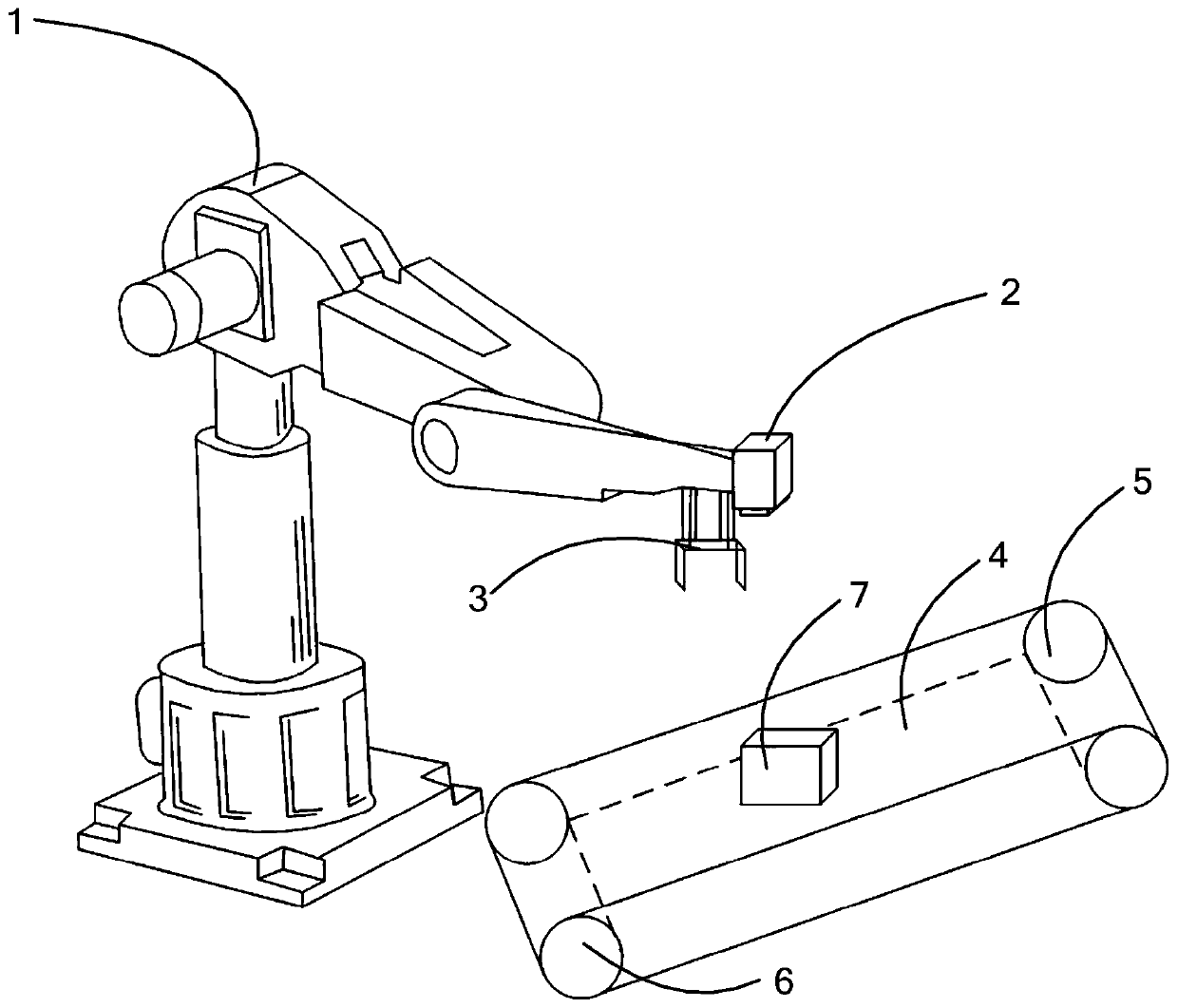
[0031] The industrial robot visual identification, positioning, and grasping method of the present invention is an application program applied to industrial robots, and is used to realize the identification, positioning, and grasping of targets. preferred, such as figure 1 As shown, the industrial robot assembly line includes industrial robot 1, camera 2, robot arm 3, synchronous belt 4, driving wheel 5 and driven wheel 6, industrial robot 1 is used to control camera 2 and robot arm 3, driving wheel 5 and driven wheel 6 Drive the synchronous belt 4 to make the target 7 on the synchronous belt 4 move.
[0032] The industrial robot visual identification, positioning, and grasping method of the present invention is an application program applied to industrial robots, and is used to realize the identification, positioning, and grasping of targets. The present invention also provides a computer device, which includes a controller, and the controller is used to implement the steps ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More