

High-performance industrial robot controller
An industrial robot and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as difficulty in meeting the real-time requirements of robots, difficulty in adapting to industrial robot application scenarios, and poor processor computing power, etc. Scalability, high security, and the effect of improving computing power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
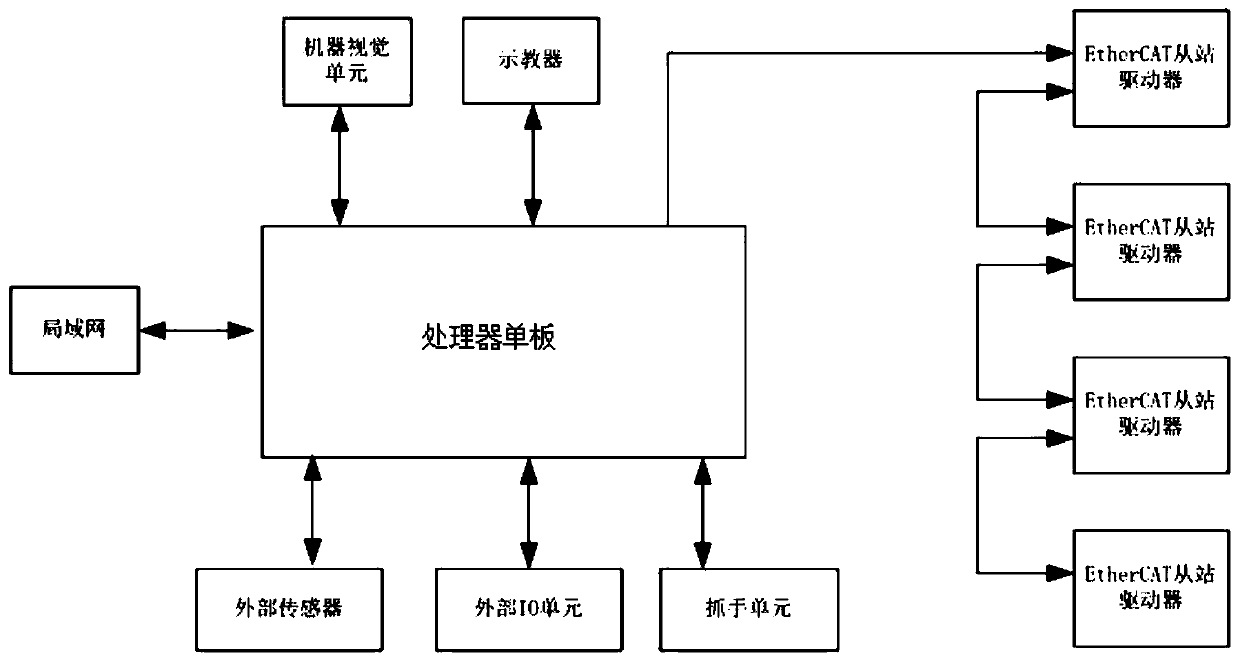
[0041] Such as figure 1 As shown, a high-performance industrial robot controller includes a processor board, a machine vision unit, a teaching pendant, an external IO unit, a gripper unit, an external sensor, and a motor driver;
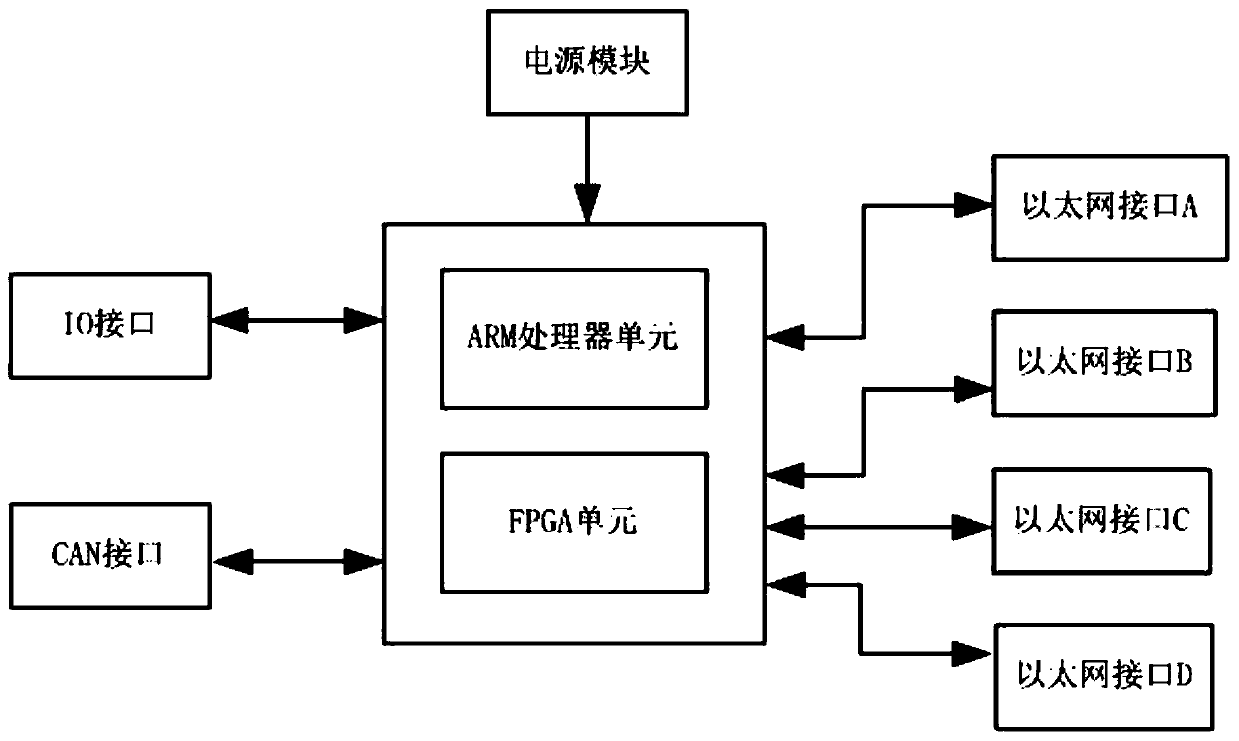
[0042] Among them, such as figure 2 As shown, the processor board includes an ARM processor unit, an FPGA unit, a power module, an Ethernet interface A, an Ethernet interface B, an Ethernet interface C, an Ethernet interface D, an IO interface, and a CAN interface;
[0043] Among them, the FPGA unit and the ARM processing unit are connected through a high-speed link, and two Ethernet interfaces are output from the ARM end, and two Ethernet interfaces are output from the FPGA; the CAN interface and the IO interface are respectively connected to the ARM processor unit, and the power module Provide power for the processor board;
[0044] Among them, the Ethernet interface B of the processor board is connected to the teaching pendant, the Ethernet int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More