

Leg walking control system of bionic robot
A bionic robot, walking control technology, applied in the field of robotics, to achieve the effect of low latency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
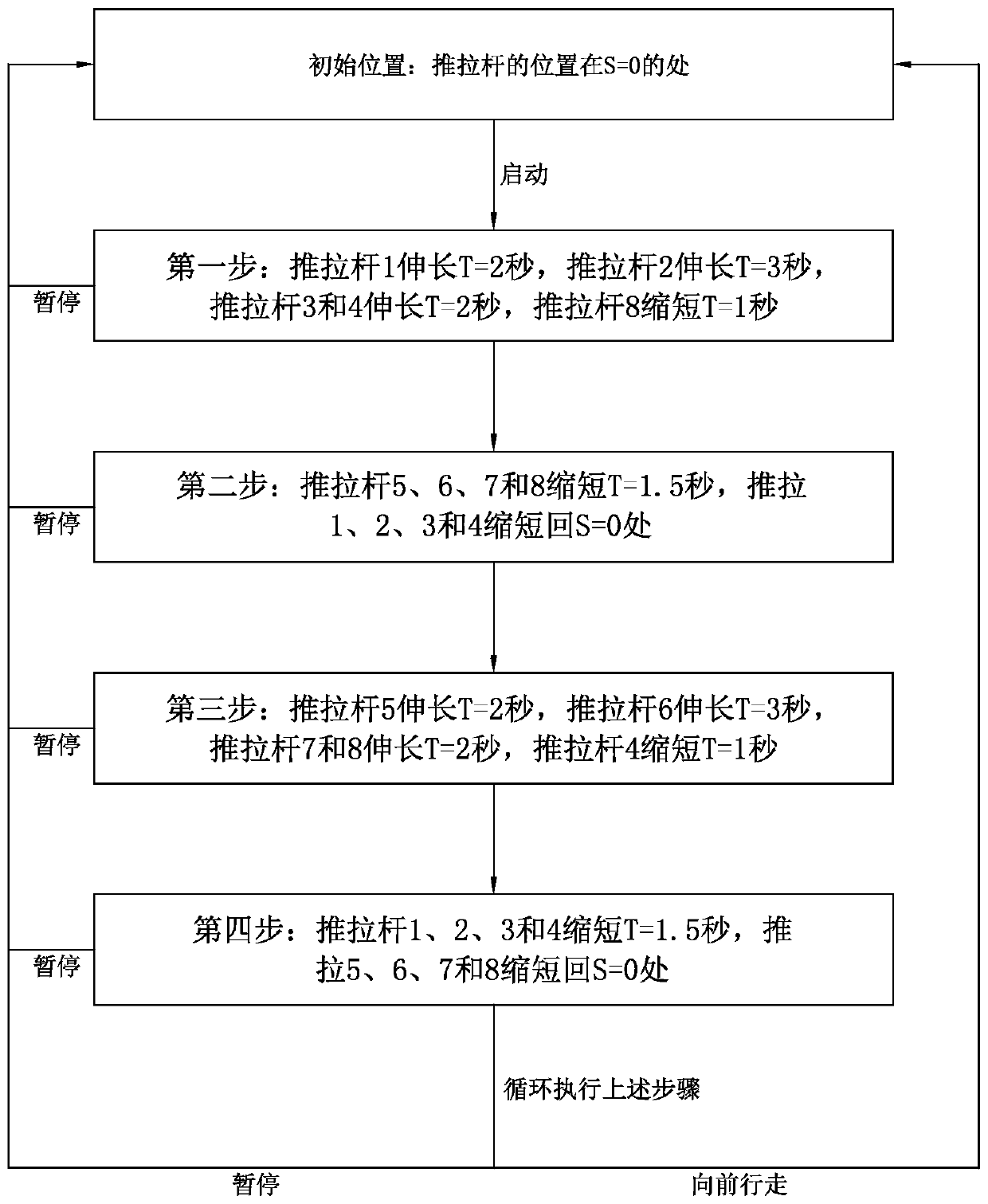
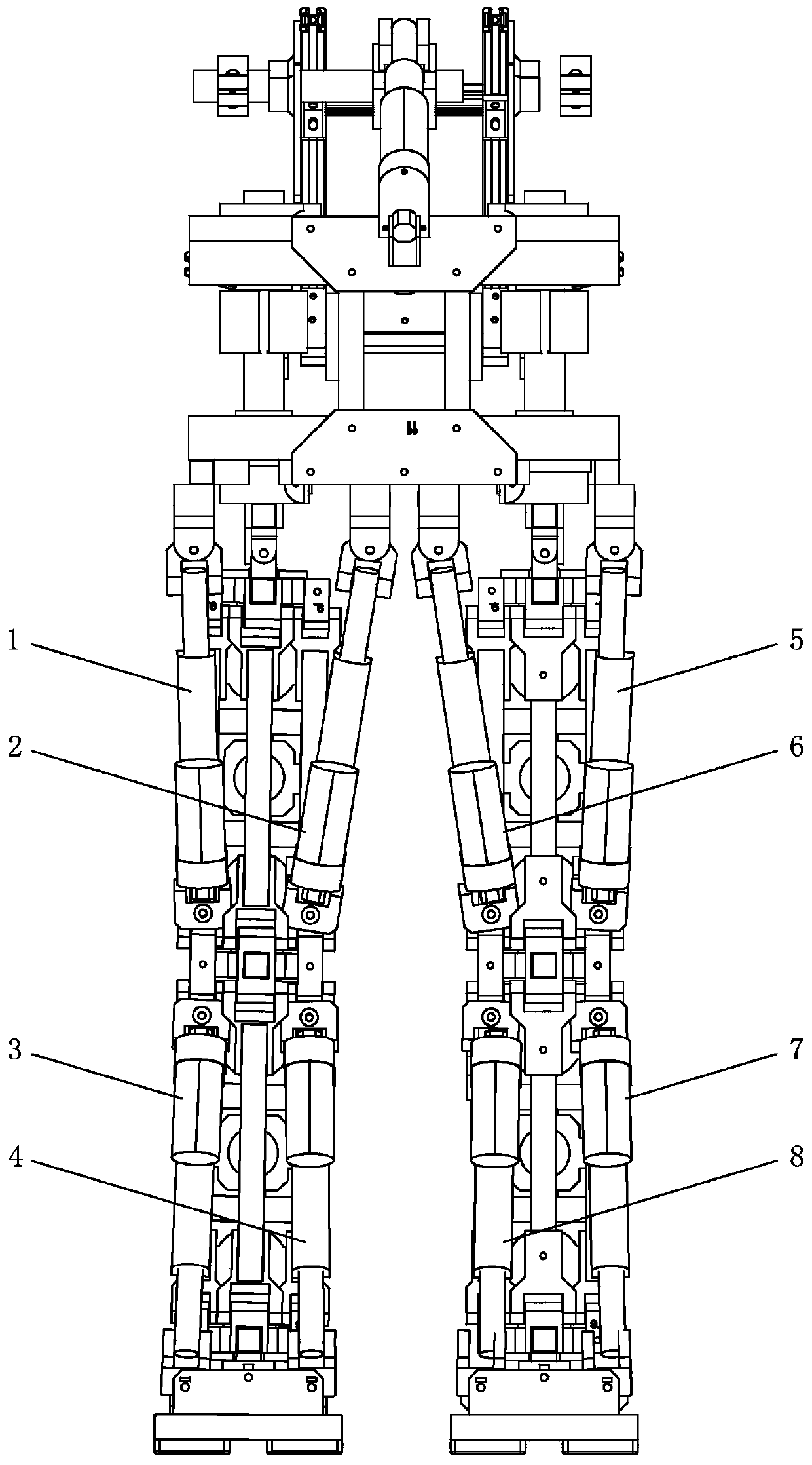
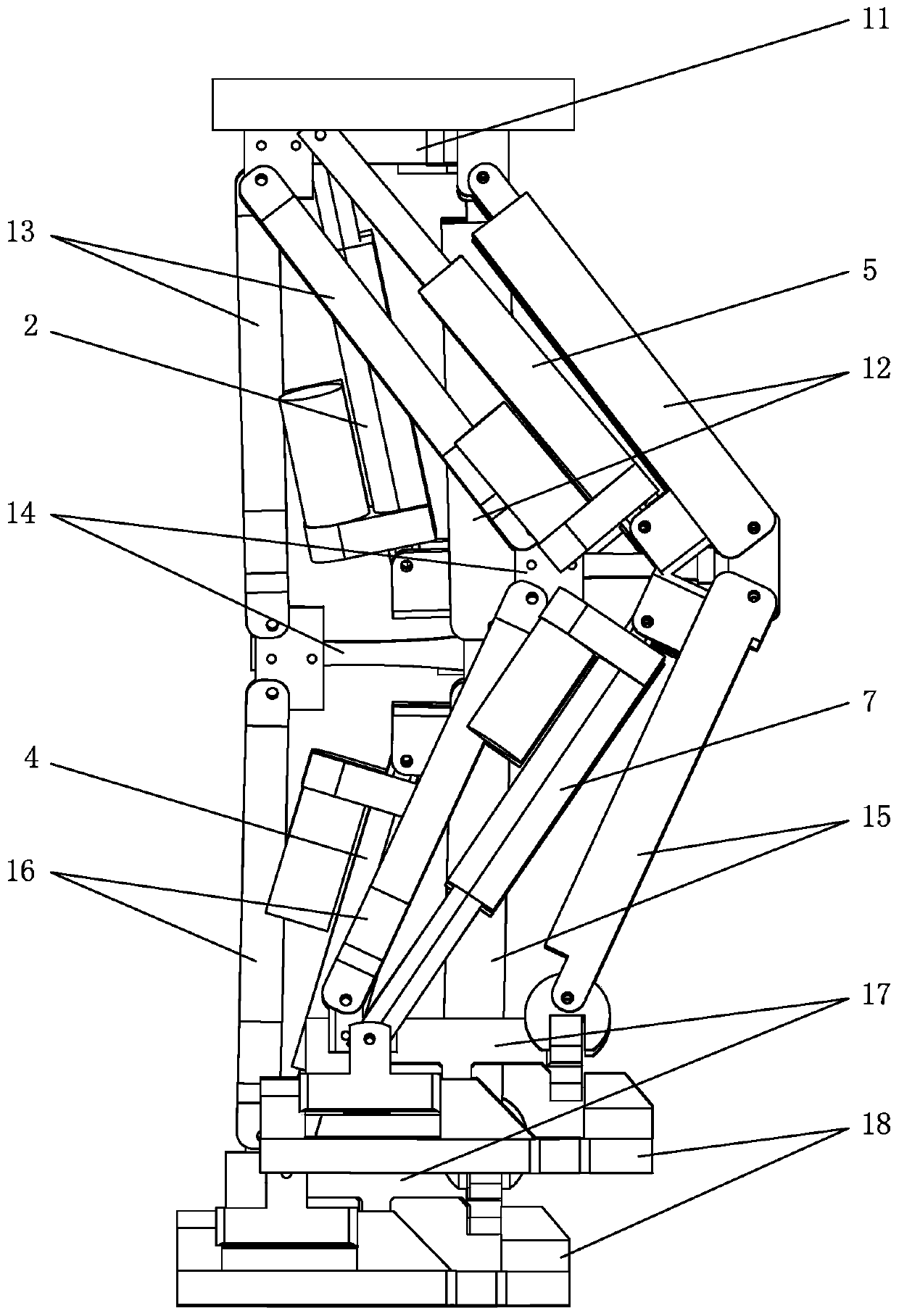
[0039] see Figure 1-Figure 3 , in the leg walking control system of the bionic robot, the bionic robot involved includes the first leg assembly (left side) and the second leg assembly (right side); the first leg assembly includes the thigh assembly located in The first thigh push-pull rod 1 on the outside, the second thigh push-pull rod 2 positioned on the inside in the thigh assembly, the first calf push-pull rod 3 positioned on the outside in the calf assembly, and the second calf push-pull rod 4 positioned on the inside in the calf assembly; The second leg assembly includes the third thigh push-pull rod 5 positioned at the outside in the thigh assembly, the fourth thigh push-pull rod 6 positioned at the inside in the thigh assembly, the third calf push-pull rod 7 positioned at the outside in the calf assembly, and the third calf push-pull rod 7 posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More