

Power patrol unmanned aerial vehicle path planning method and power transmission line patrol method
A technology of path planning and power inspection, applied in vehicle position/route/height control, non-electric variable control, instruments, etc., can solve problems such as non-optimal trajectory, planned path exceeding, detection range entering, etc. The effect of planning quality, shooting quality improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
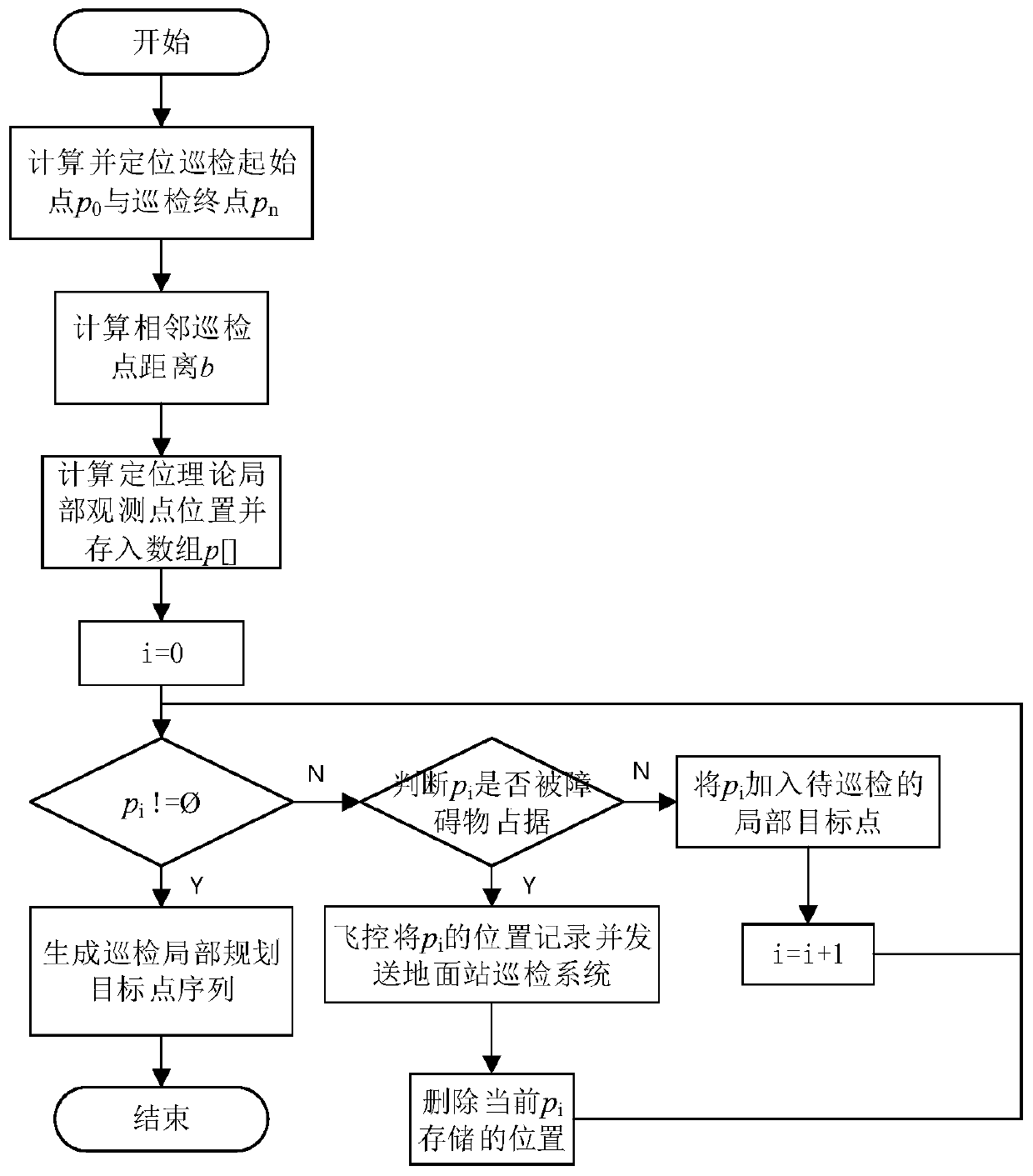
[0036] The path planning method proposed by the present invention is applied to unmanned aerial vehicle power inspection, such as Figure 7 As shown, the following steps are included.
[0037] S1. First, divide the ideal path into several segments according to the coincidence degree of the transmission line taken by the camera, and set the local target points respectively. If it is occupied by obstacles, delete the point from the local target point array and send it to the ground station. Record keeping.
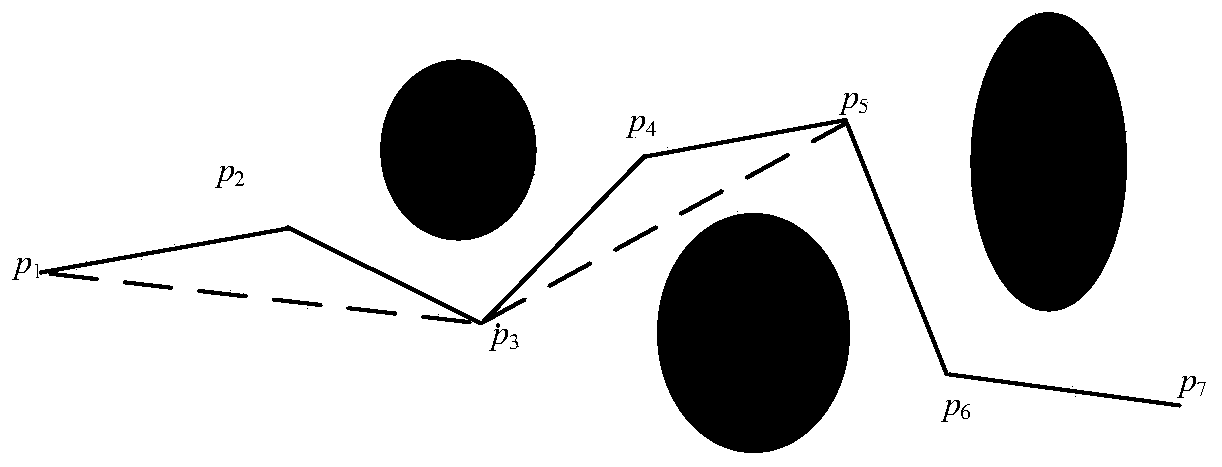
[0038]S2. When an obstacle is detected between two adjacent local target points during the flight, establish a cylinder whose radius is determined based on the obstacle, with the line conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More