

A multi-degree-of-freedom mechanical wheel-leg structure of a wheel-leg compound mobile robot
A mobile robot, a composite technology, applied in the direction of motor vehicles, transportation and packaging, can solve the problems of fixed length of mechanical legs, slow walking, poor terrain adaptability, etc., to improve passive adaptability, reduce the weight of the mechanism, maintain swing The effect of the angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
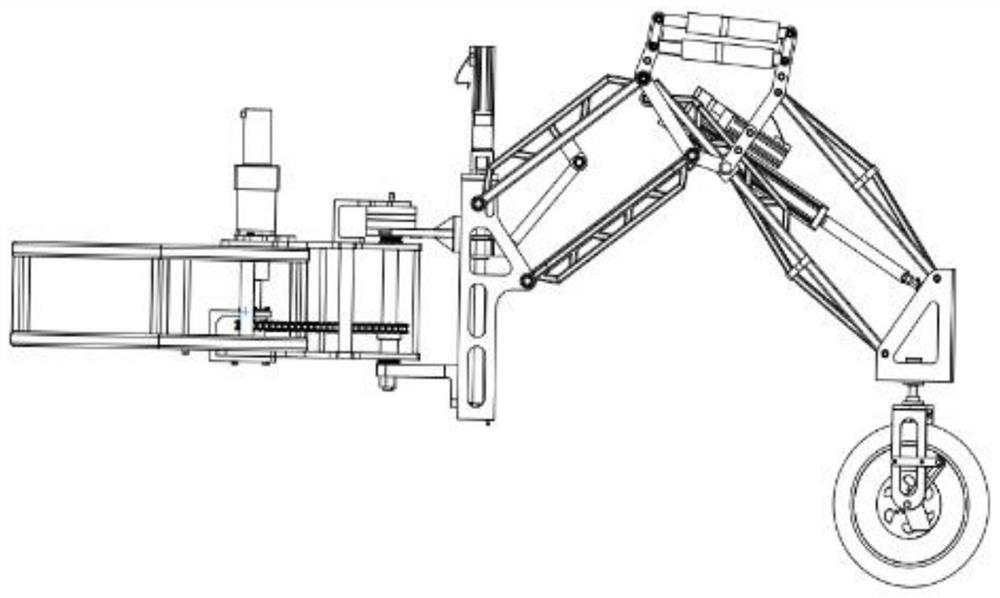
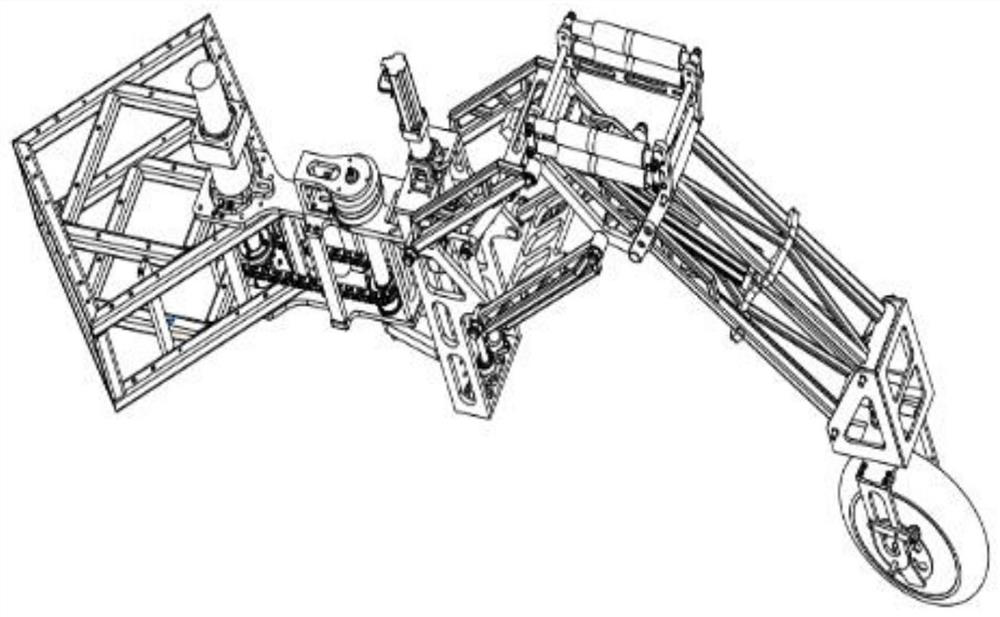
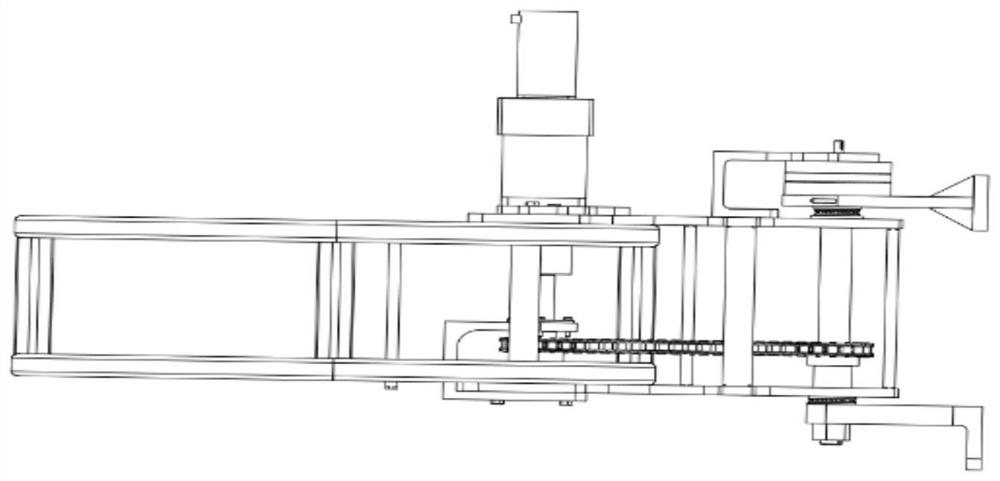
[0032] This embodiment is a multi-degree-of-freedom mechanical wheel-leg structure of a wheel-leg compound mobile robot.
[0033] refer to Figure 1 to Figure 12 , the multi-degree-of-freedom mechanical wheel-leg structure of the wheel-leg composite mobile robot in this embodiment is composed of a hip joint chain transmission locking swing mechanism, a thigh screw slide table lifting and stretching telescopic mechanism, a knee joint impact-resistant spring buffer mechanism, and a calf electric cylinder. It is composed of a force feedback telescopic mechanism, a wheel hub large-angle steering structure and an electric wheel hub. Four mechanical wheel legs are symmetrically installed at the four corners of the central frame. Each mechanical wheel leg has six degrees of freedom relative to the central frame. Among them, the hip joint chain transmission locking swing mechanism includes frame top connecting plate 5, frame bottom connecting plate 15, main transmission shaft 17, dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More