

Cable-driven series-parallel palletizing robot with characteristics of light weight and high bearing capacity
A palletizing robot and cable-driven technology, which is applied in the stacking of objects, de-stacking of objects, and manipulators, etc., can solve the problems of large overall mass, small load, and poor dynamic performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0107] Embodiments of the present invention will be described in detail below, and examples of the embodiments are illustrated in the drawings, in which the same or similar reference numerals represent the same or similar elements or elements having the same or similar functions. The following is exemplary, and is intended to be illustrative of the invention, not to be construed as limiting the invention.
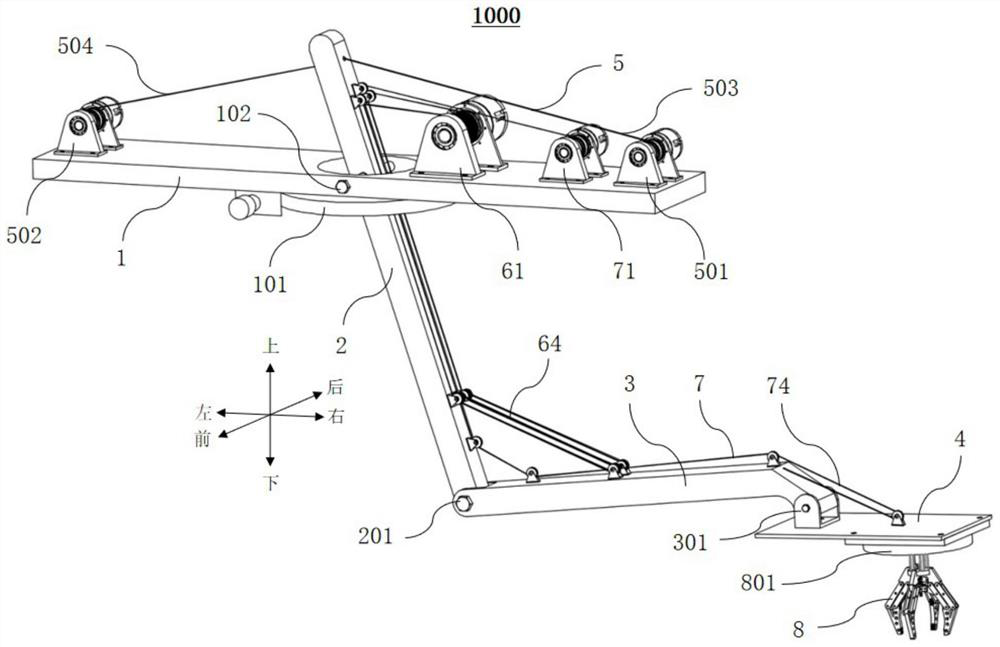
[0108] By below Figure 1 to 18 A ropolifier mixed chaitacler 1000 having a lightweight high bearing characteristic of the present invention is described herein.
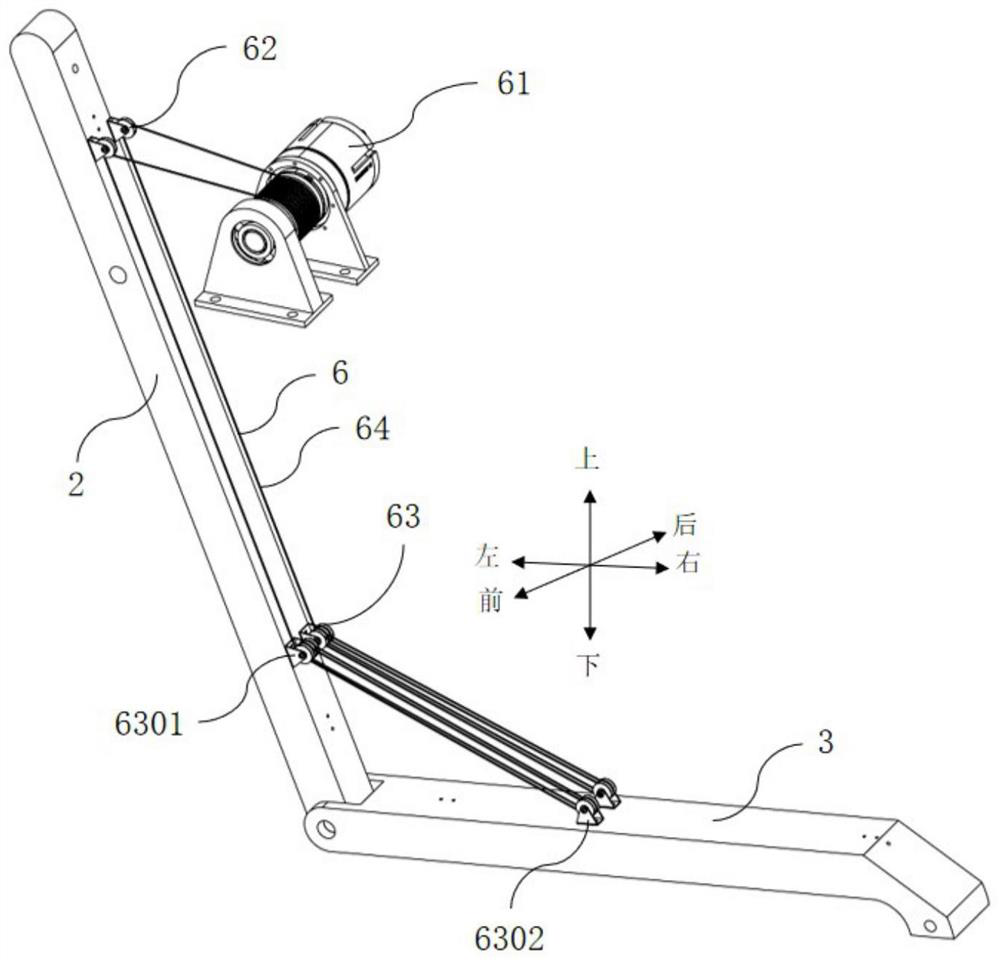
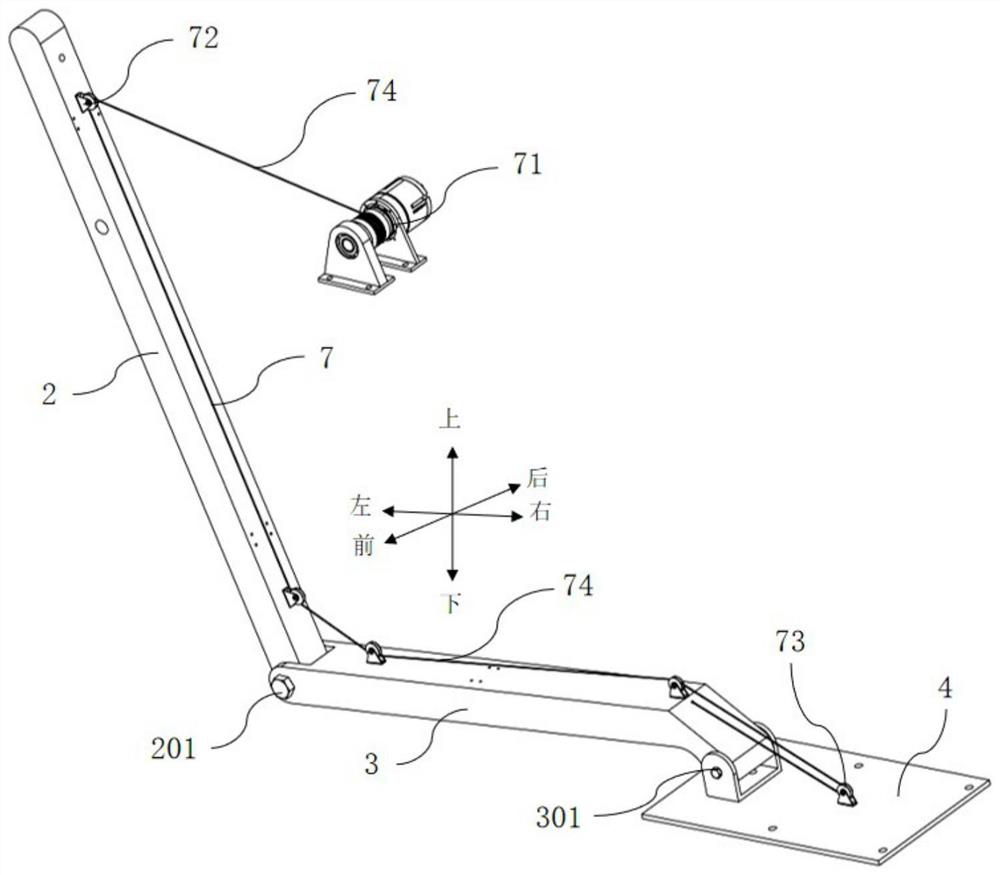
[0109] Such as figure 1 As shown, the ribo-drive mixed chalet of the present invention has a lightweight high bearing characteristic, including the base 1, the upper link 2, the lower rod 3, the connecting plate 4, shoulder softeduked branches. 5, elbow joint softening branches 6, wrist joint drive branches 7 and mechanical grab device 8. Among them, the rotary drive assembly 101 is mounted on the base 1, the rotary d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More