Position and posture calibration method, system and medium for lidar and combined inertial navigation
A laser radar and pose calibration technology, applied in the computer field, can solve the problems of difficulty in production, low accuracy, and time-consuming pose calibration, and achieve the effect of improving the scope of application, reducing requirements, and improving efficiency and accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
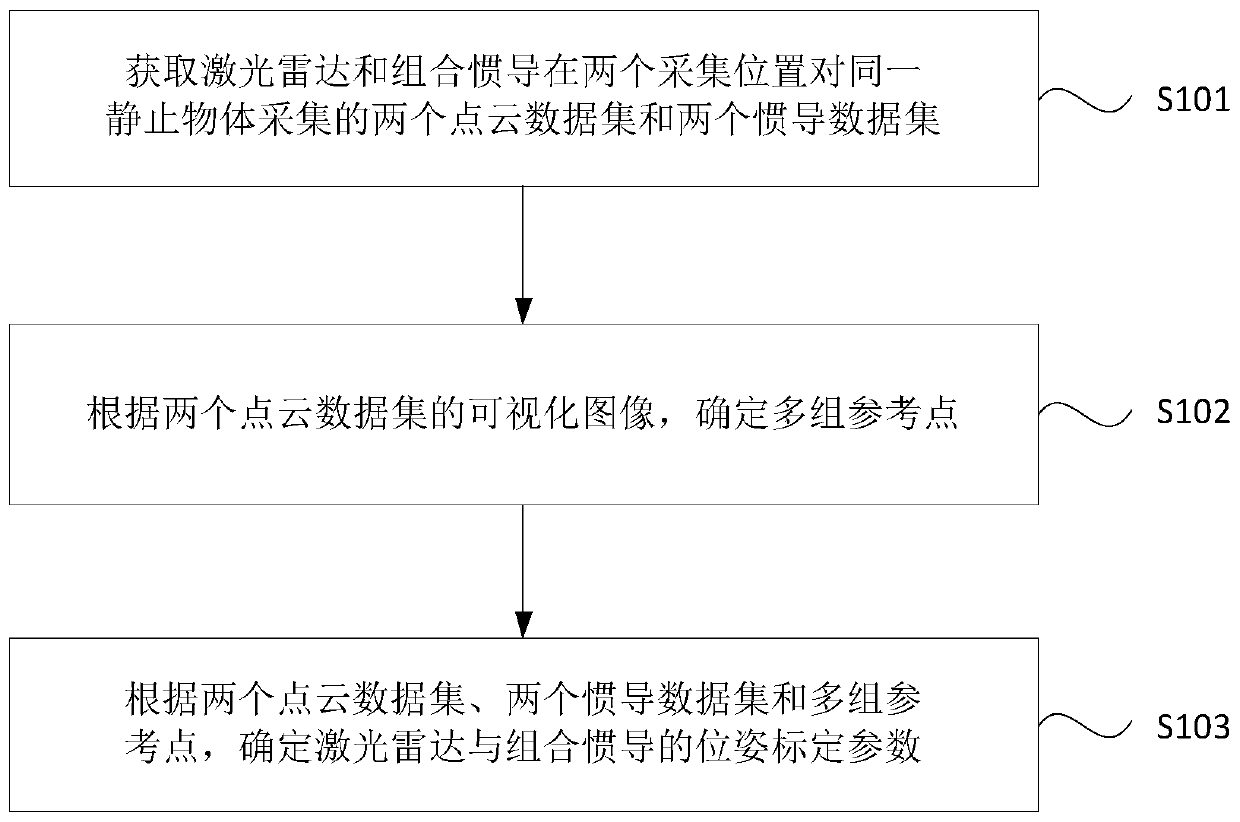
[0029] figure 1 It is a flow chart of a pose calibration method for lidar and integrated inertial navigation provided by Embodiment 1 of the present invention. This embodiment is applicable to how to accurately calibrate the relative pose between lidar and integrated inertial navigation. The method can be executed by the control device in the surveying and mapping system of the embodiment of the present invention, and the control device can be realized by software and / or hardware. Such as figure 1 As shown, the method specifically includes the following steps:
[0030] S101. Acquire two point cloud data sets and two inertial navigation data sets collected from the same stationary object by the lidar and the integrated inertial navigation at two collection positions.
[0031] Wherein, the laser radar is a radar system that emits laser beams to detect the position of an object. Optionally, the laser radar in this embodiment may be a multi-line laser radar. Combined inertial n...
Embodiment 2
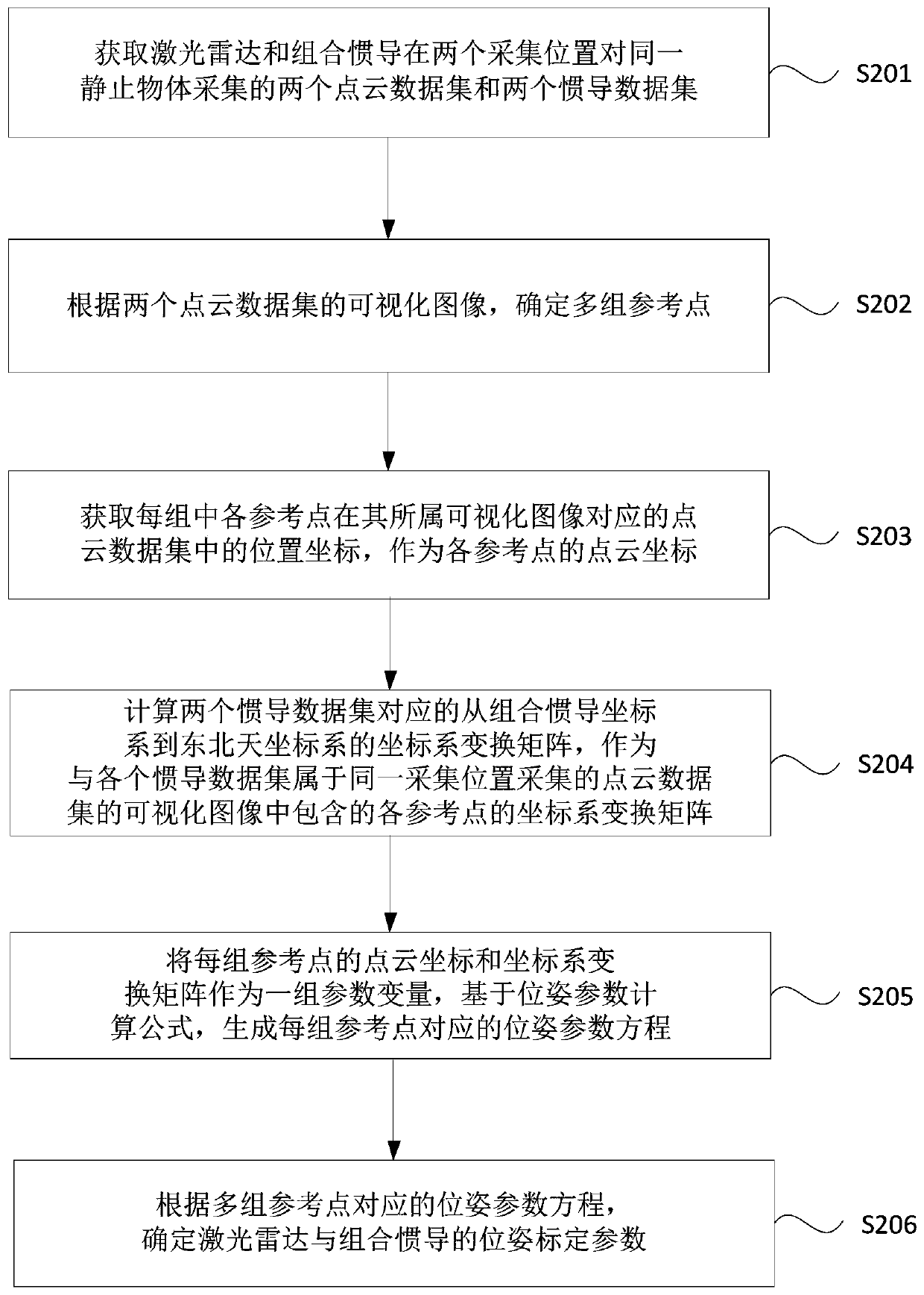
[0044] figure 2 It is a flow chart of a pose calibration method for laser radar and integrated inertial navigation in Embodiment 2 of the present invention. This embodiment is based on the above-mentioned embodiment, and further optimization is carried out. Specifically, how to Cloud data set, two inertial navigation data sets and multiple sets of reference points, and the specific situation of determining the pose calibration parameters of lidar and integrated inertial navigation. Such as figure 2 As shown, the method of this embodiment specifically includes the following steps:
[0045] S201. Acquire two point cloud data sets and two inertial navigation data sets collected from the same stationary object by the lidar and the integrated inertial navigation at two collection positions.
[0046] Wherein, the laser radar and the combined inertial navigation are rigidly connected.
[0047] S202. Determine multiple sets of reference points according to the visualized images o...
Embodiment 3
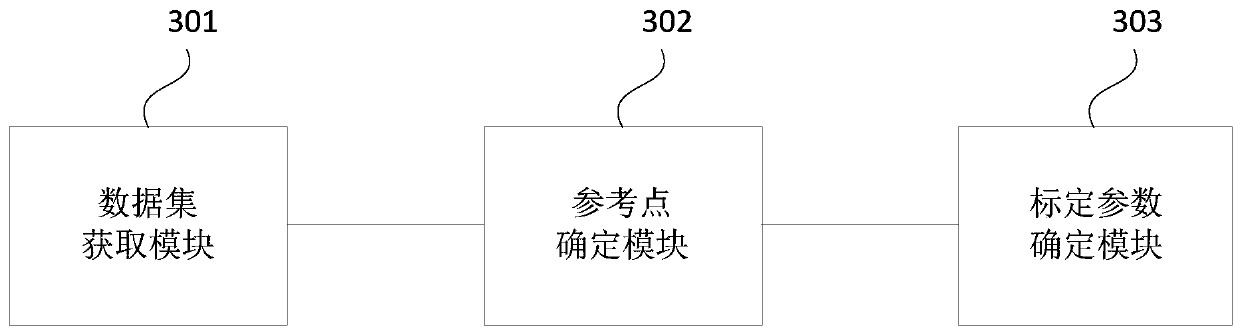
[0082] image 3 It is a schematic structural diagram of a pose calibration device for laser radar and integrated inertial navigation provided by Embodiment 3 of the present invention. The device can execute the pose calibration method of laser radar and integrated inertial navigation provided by any embodiment of the present invention, and has corresponding functional modules and beneficial effects for executing the method. Such as image 3 As shown, the device specifically includes:
[0083] The data set acquisition module 301 is used to obtain two point cloud data sets and two inertial navigation data sets collected by the lidar and the integrated inertial navigation on the same stationary object at two collection positions; the lidar and the integrated inertial navigation Rigid connection;
[0084] The reference point determination module 302 is configured to determine multiple sets of reference points according to the visualized images of the two point cloud datasets; w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com