

Novel auto-coupling PI cooperative control theory method
A collaborative control and new method technology, applied in the direction of electric controllers, controllers with specific characteristics, etc., can solve the problems of control force dimension mismatch principle, only PI control force, and the existence of external disturbances, etc., to achieve good internal resistance Robustness, simple structure, and the effect of solving difficult tuning problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] 1. Mapping ideas from unknown non-affine nonlinear systems to linear uncertain systems
[0061] 1) Problem background
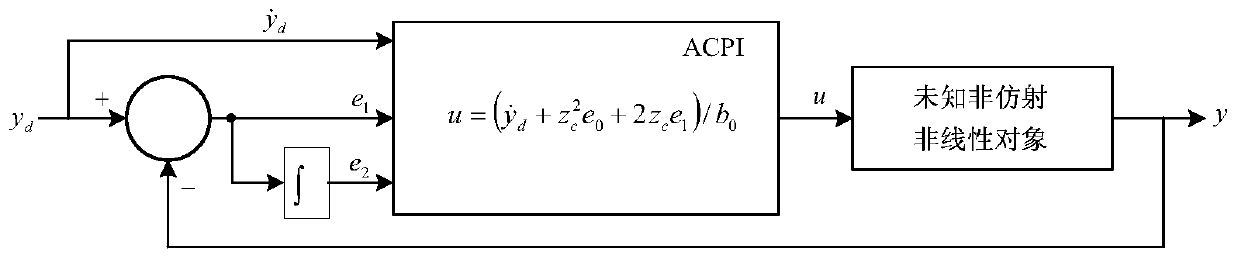
[0062] Suppose a certain order non-affine nonlinear system is:
[0063]
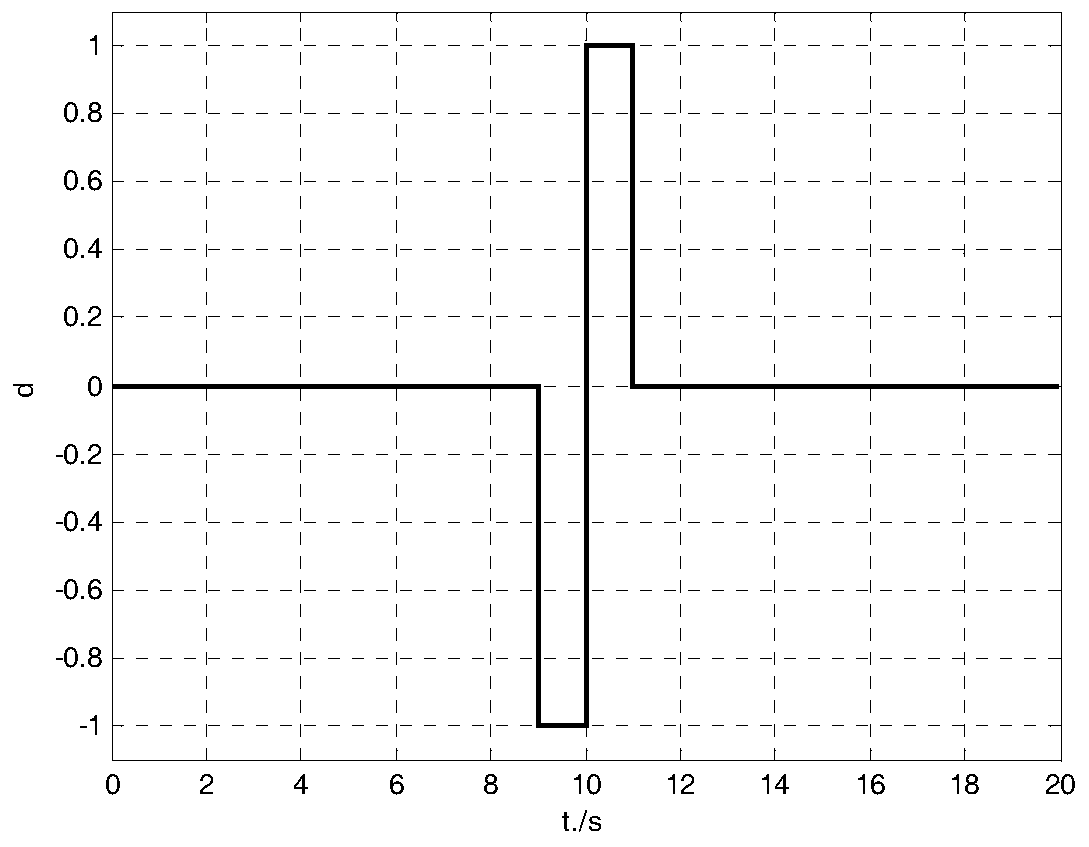
[0064] Among them, y 1 is the measurable state of the system, u and y are the control input and actual output of the system respectively, f(y 1 ,u,ξ) is the system unknown smooth function, ξ is the model parameter (considering the time-varying situation), d is the external bounded disturbance.
[0065] Since non-affine nonlinear systems widely exist in the field of actual control engineering, they are difficult and hot issues in the field of nonlinear system control. The control method of the system is used to design the controller. In order to solve the control problem of the non-affine nonlinear system, the present invention first maps the non-affine nonlinear system to an equivalent affine linear uncertain system by referring to the concept of sum disturbance, and desig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More