

Mobile robot and control method
A technology for moving robots and moving paths, used in non-electric variable control, control/regulation systems, program-controlled manipulators, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
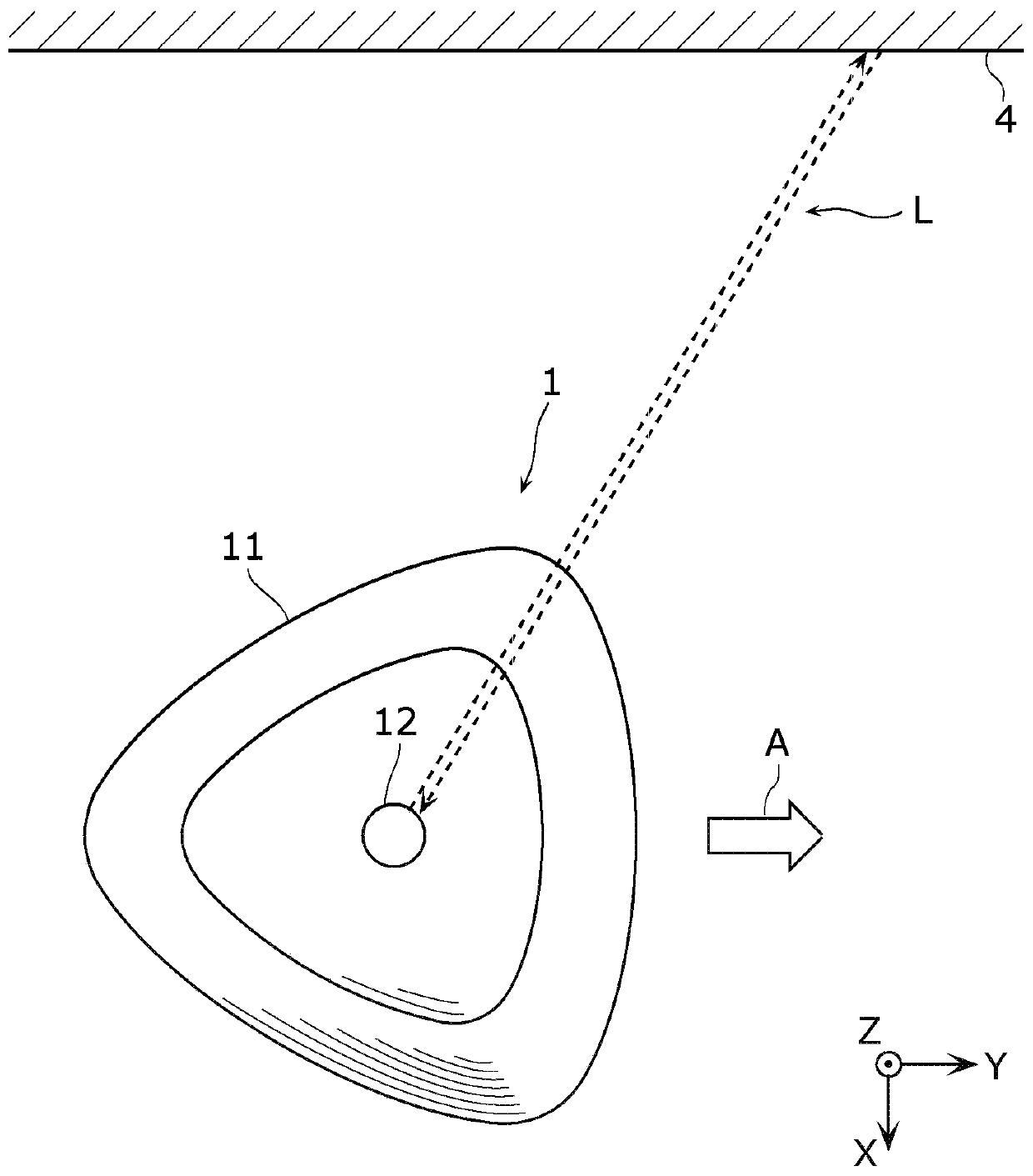
[0058] In this embodiment, the vacuum cleaner 1 will be described as a mobile robot that can move on a more appropriate movement path. In addition, the mobile robot can be applied to a mobile robot for various inspections, a transport robot for transporting articles, a communication robot for communicating with people, and the like in addition to the vacuum cleaner 1 . In addition, the moving path is also simply referred to as a path.
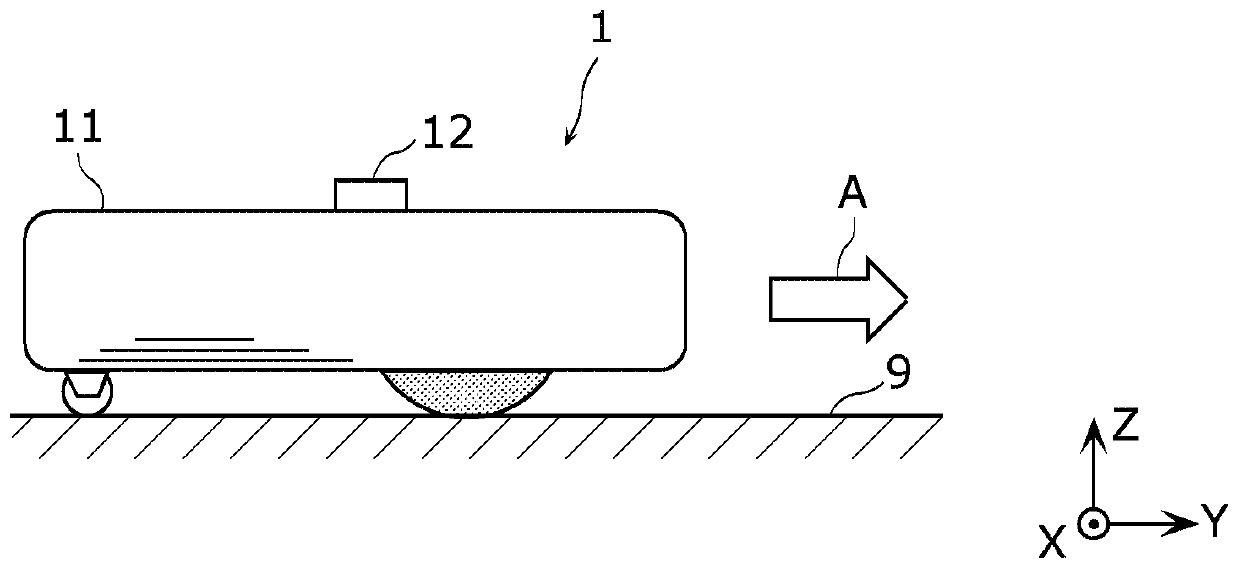
[0059] figure 1 as well as figure 2 It is a top view and a side view which schematically show the appearance of the vacuum cleaner 1 in this embodiment, respectively. The operation of the vacuum cleaner 1 will be described with reference to these figures. In addition, in the following description, it demonstrates using the XYZ coordinate axis|shaft shown in each figure. In addition, the positive direction of the Z axis is referred to as an upward direction.
[0060] The vacuum cleaner 1 automatically moves on the cleaning surface 9 in the...
Embodiment approach 2
[0152] In this embodiment, vacuum cleaner 1A which is a mobile robot which can move with a more appropriate movement route is demonstrated. Like the vacuum cleaner 1 of Embodiment 1, the cleaner of this embodiment generates a 2nd route, and further generates a 3rd route different from a 2nd route. And, select one path from the second path or the third path, and move along the selected path.
[0153] Vacuum cleaner 1A of this embodiment differs from vacuum cleaner 1 of Embodiment 1 in the structure of control circuit 19 . Hereinafter, the configuration of the control circuit 19A corresponding to the control circuit 19 of the first embodiment will be described in detail.
[0154] Figure 22 It is a block diagram showing in detail the function of the control circuit 19A of the vacuum cleaner 1A in this embodiment.
[0155] Such as Figure 22 As shown, the control circuit 19A includes an acquisition unit 21A, a determination unit 22 , a conversion unit 23 , a motor control uni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More