

Intelligent operation room shifting device
A technology for shifting devices and operating rooms, which is applied to workbenches, manipulators, and program-controlled manipulators. It can solve problems such as unstable liquid states, potential safety hazards, and difficulty in maintaining a stable internal liquid state, achieving good protection and proper movement. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
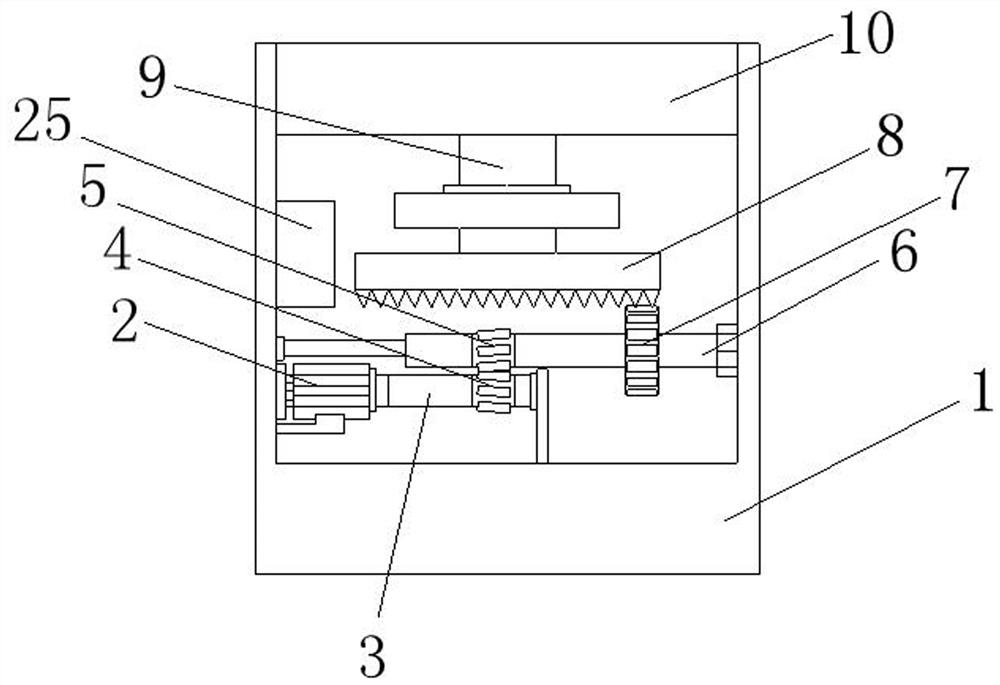
[0030] Embodiment 1, according to Figure 1-2 , the second controller 25 sends out a signal, and the second controller 25 controls the action of the first motor 2. With the rotation of the output end of the first motor 2, the driving rod 3 is driven to rotate, and the gap between the first gear 4 and the second gear 5 is used to The meshing effect to drive the rotating rod 6 to rotate, and then drive the third gear 7 to rotate through the rotating rod 6, and through the meshing effect between the third gear 7 and the ring gear 8, drive the ring gear 8 to rotate, and let the ring gear 8 The connecting column 9 drives the turntable 10 to rotate to realize the angle adjustment action of the whole device.
Embodiment 2
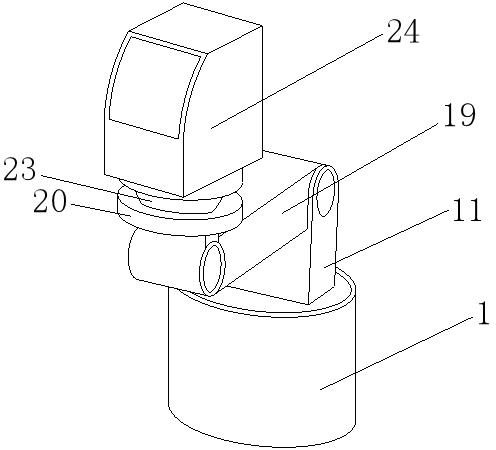
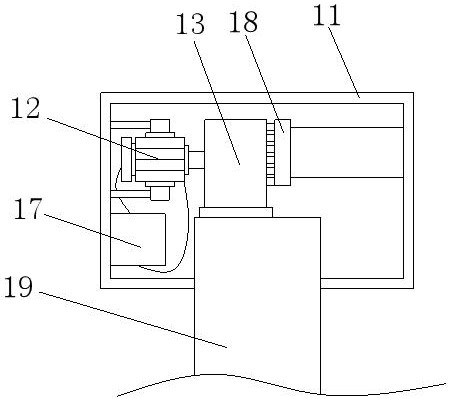
[0031] Embodiment 2, according to figure 1 , Figure 3-5 , Figure 8 , when adjusting the position of the console 24, the second motor 12 is controlled by the first controller 17 to operate, and the steering wheel 13 is driven to rotate with the rotation of the output end of the second motor 12. When the steering wheel 13 rotates, the limit The block 16 escapes from the groove provided inside the fixed block 18 by the compression spring 15. After the steering wheel 13 stops rotating, the limiting block 16 enters the groove inside the fixed block 18 again under the action of the spring 15, and controls the steering The angle of the tray 13 is fixed so that the height of the console 24 can be changed.
Embodiment 3
[0032] Embodiment 3, according to Figure 6-7 , when the overall device rotates and the height of the console 24 lifts, the electromagnet 22 is energized and generates magnetism at the end in contact with the magnetic plate 21, which strengthens the magnetic force of the magnetic plate 21, and the magnetic force produced by the magnetic plate 21 and the magnetic ball 23 The magnetic force between them keeps the operating table 24 in a suspended state all the time, and keeps the center of gravity of the operating table 24 at one point all the time, thereby realizing the maintenance of the stable state of the operating table 24.
[0033] Working principle: when in use, when the overall device needs to be rotated, the external control device sends a signal to the second controller 25, and the second controller 25 controls the action of the first motor 2, and through the rotation of the output end of the first motor 2, Drive the driving rod 3 to rotate, and then drive the rotating...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More