

Indoor firefighting robot and work method thereof
A fire extinguishing robot and robot technology, applied in the field of fire extinguishing robots, can solve problems such as economic losses, failure to monitor fires, and loss of life and property, and achieve the effects of reducing economic losses, improving overall control capabilities, and ensuring personal safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
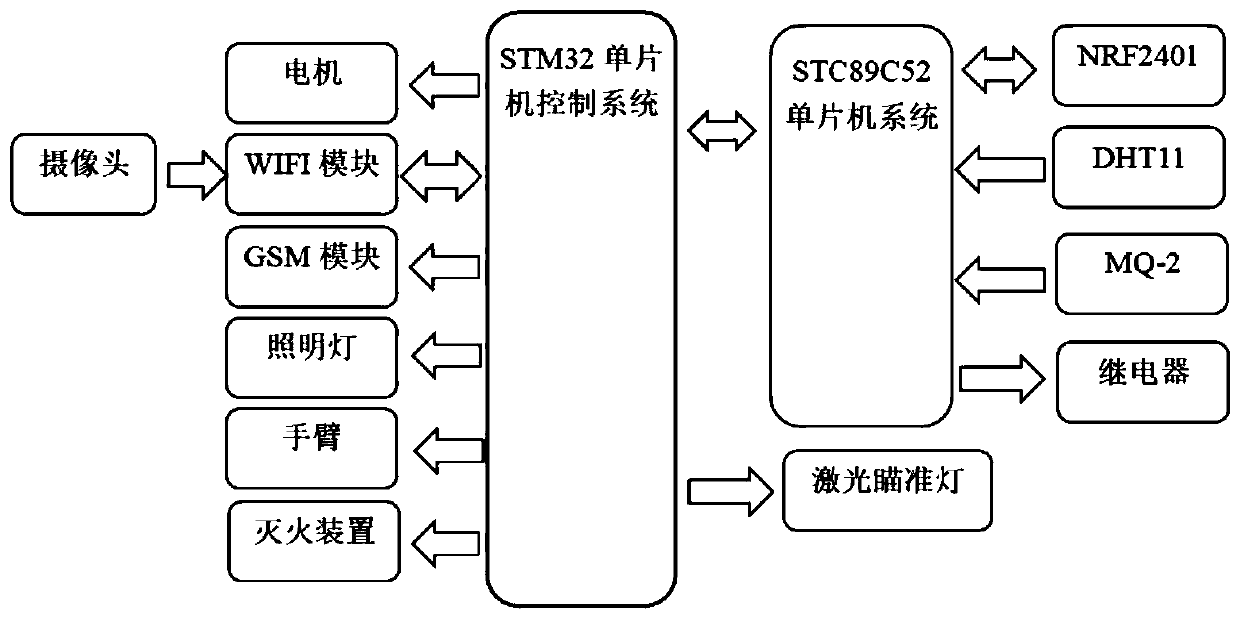
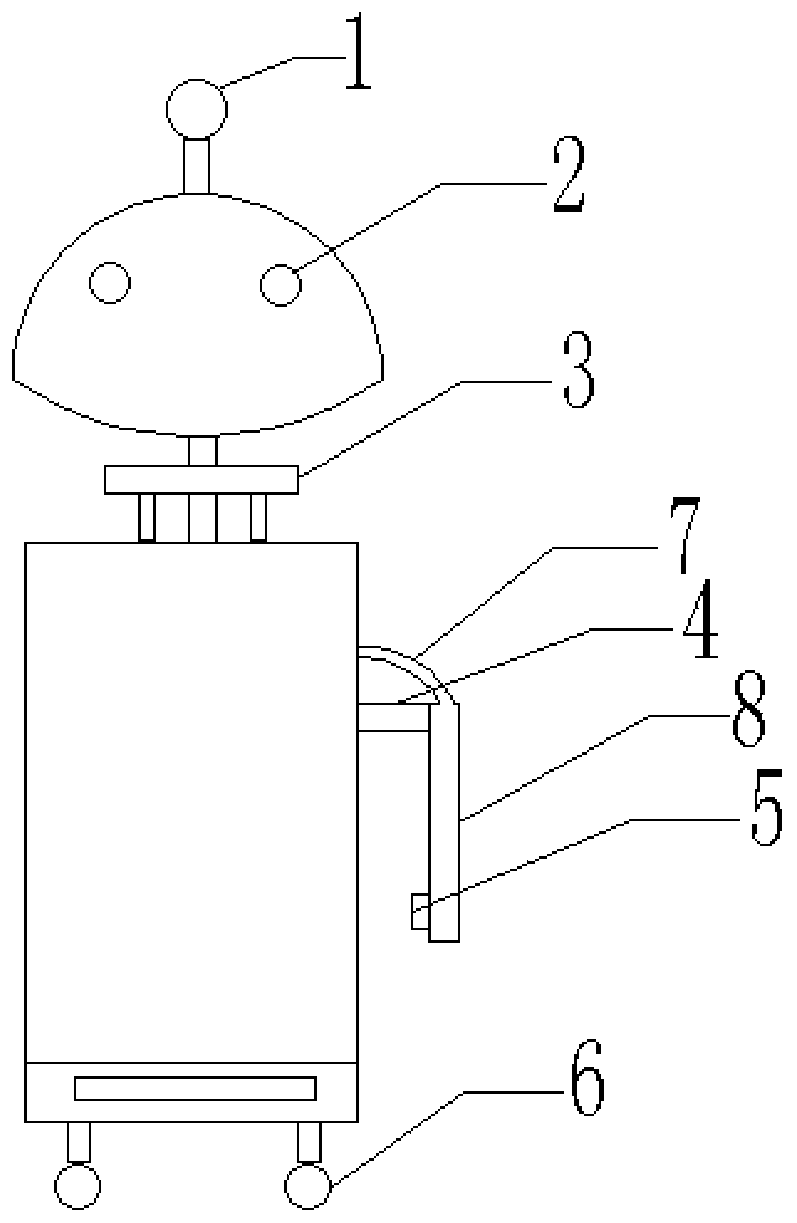
[0047] Such as Figure 1-6 As shown, Embodiment 1 of the present disclosure provides an indoor fire-fighting robot, including at least one robot host and a plurality of robot slaves placed in indoor fire-prone positions, and the robot host includes at least a first microcontroller 15, a fire extinguisher 12 And vision module 2, and described robot host can freely move indoors by universal wheel 6; 3 Realize free rotation in the horizontal direction.
[0048] The first micro-controller adopts the STM32F103ZET6 single-chip microcomputer as the main control chip, and in addition controls the movement of the robot host through the STM32 single-chip microcomputer, and the robot host is also provided with at least a combustible gas sensor, a smoke sensor and a temperature and humidity sensor. The indoor environment is monitored in real time, and at the same time, when a fire occurs, the collected data can be compared and analyzed in real time with the data collected at the fire poi...
Embodiment 2
[0064] Embodiment 2 of the present disclosure provides an indoor fire-fighting robot. When a fire occurs at the positions of multiple robot slaves at the same time, the first micro-controller sends a control command to the robot slave at the indoor general power supply position to turn off the indoor general power supply. At the same time, the first micro-controller judges the distance between each ignition point and the robot host, and quickly moves to the nearest ignition point to put out the fire. Other settings are the same as in Embodiment 1, and will not be repeated here.
Embodiment 3
[0066] Embodiment 3 of the present disclosure provides a working method of an indoor fire extinguishing robot. Using the indoor fire extinguishing robot described in Embodiment 1 or Embodiment 2 of the present disclosure, the steps are as follows:
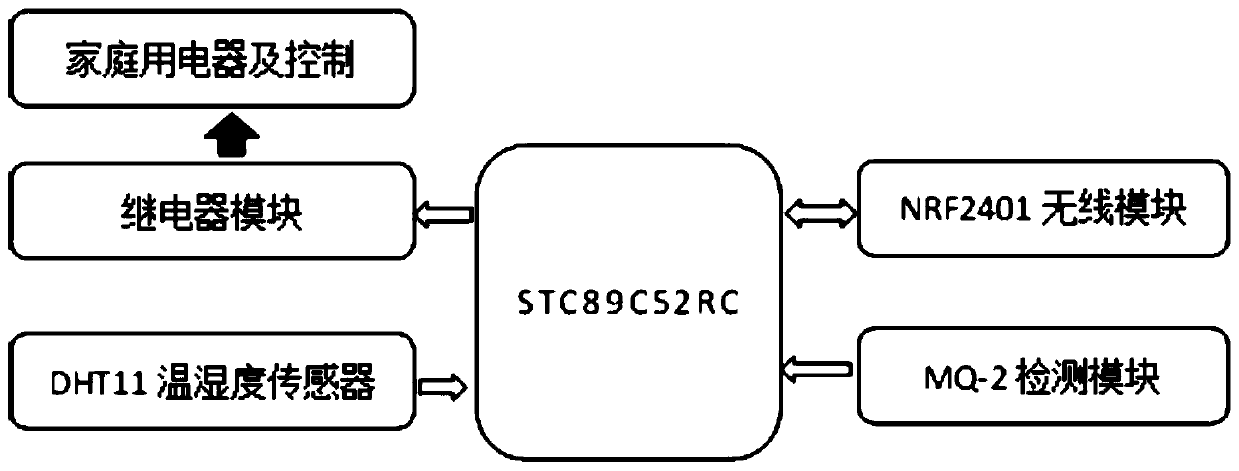
[0067] Set up at least one robot host and multiple robot slaves placed in indoor fire-prone positions. The robot slaves in the fire-prone positions collect the temperature, humidity and smoke concentration data at the fire-prone positions in real time. When at least one of the collected data is greater than the preset threshold , the second micro-controller controls the relay to cut off the power supply of the electrical equipment corresponding to the ignition point, and sends a fire extinguishing signal to the first micro-controller;
[0068] After the first micro-controller receives the fire extinguishing signal, it controls the robot mainframe to quickly move to the position of the fire point, and uses the vision module to identi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More