

A multi-mode motion control method for a heavy-duty two-stage differential multi-wheel omnidirectional vehicle
A motion control, multi-mode technology, applied in the direction of automatic steering control components, vehicle components, steering mechanisms, etc., can solve problems such as inability to apply to heavy-duty vehicles, and the control method is not flexible enough to meet actual computing needs and simplify algorithms. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
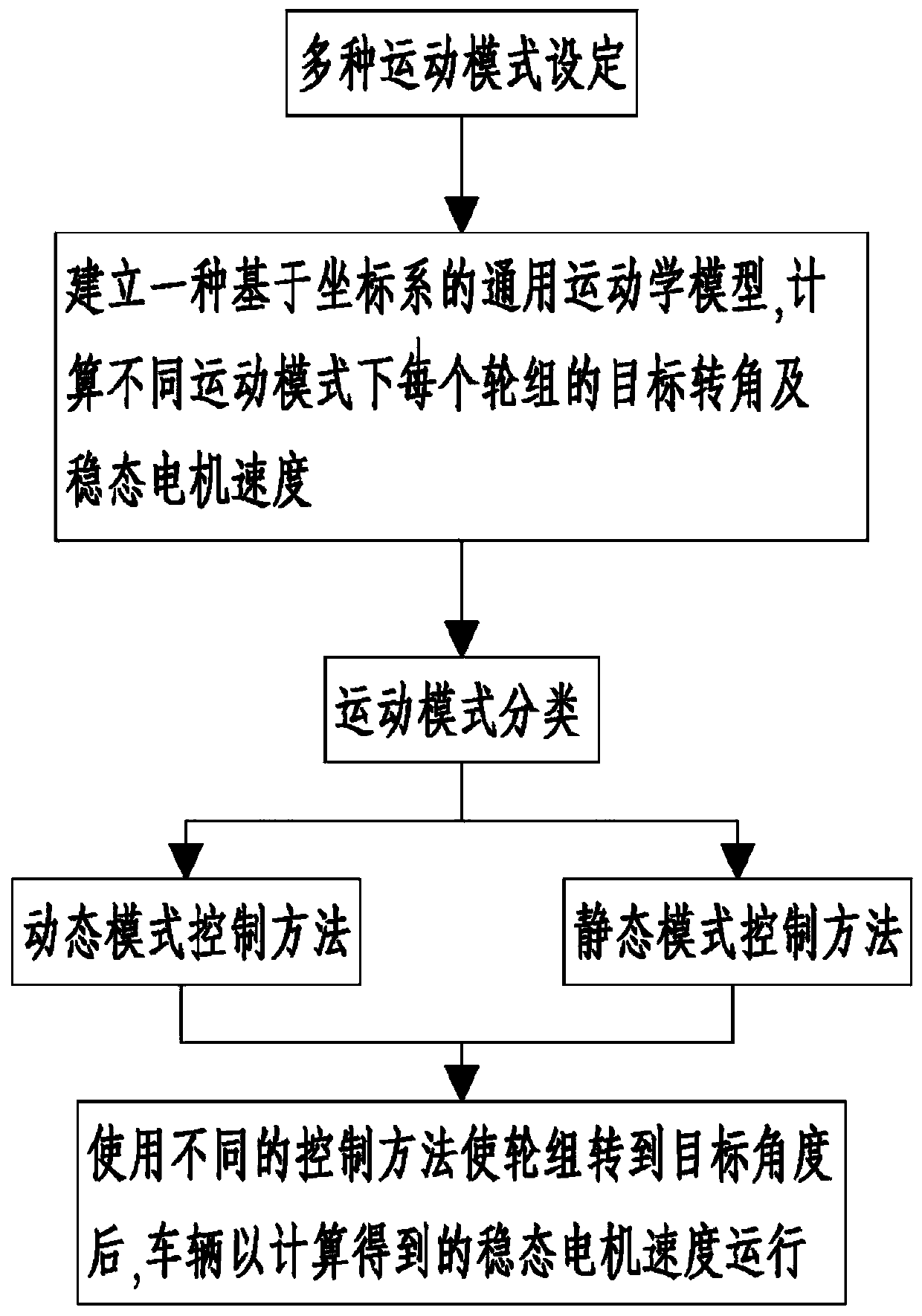
[0042]The present invention provides a multi-mode motion control method for a heavy-duty two-stage differential multi-wheel omnidirectional vehicle. Firstly, various motion modes are designed according to vehicle application requirements; According to the vehicle target speed, target rotation angle, target mode and other control information, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More