

Automatic misalignment method of unmanned equipment
An unmanned equipment and automatic technology, applied in the field of automatic distance staggering of unmanned equipment and unmanned equipment, can solve the problems of low rolling quality, lack of precision, slow speed, etc., and reduce and improve the energy consumption of operation. The effect of staggering speed and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings and through specific embodiments. The following embodiments are only descriptive, not restrictive, and cannot limit the protection scope of the present invention.
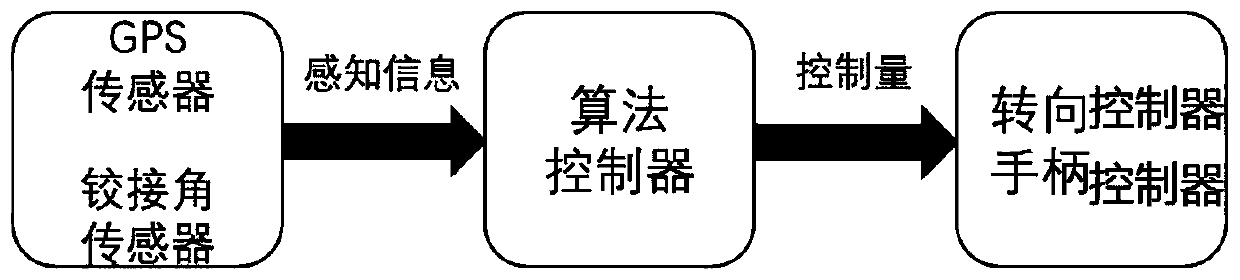
[0041] The hardware architecture scheme of the present invention is as figure 1 As shown, including sensors, algorithm controllers, and output actuators. The sensors are GPS sensors and articulation angle sensors. Use the GPS sensor to obtain the coordinate information and heading information of the unmanned equipment, use the articulation angle sensor to measure the handover angle between the front body and the rear body of the unmanned equipment, and send the two information to the algorithm controller. The output actuators are steering actuators and handle actuators. The steering actuator controls the rotation direction of the unmanned equipment by controlling the rotation of the steering wheel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More