

A small robot joint steering gear transmission error input terminal data acquisition control circuit
A technology for robot joints and transmission errors, applied in motor control, single motor speed/torque control, electromechanical devices, etc., can solve the problem of inability to accurately obtain the position information of the input terminal, to ensure safe and reliable work, and improve position positioning accuracy. , the effect of high-speed and stable transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings.
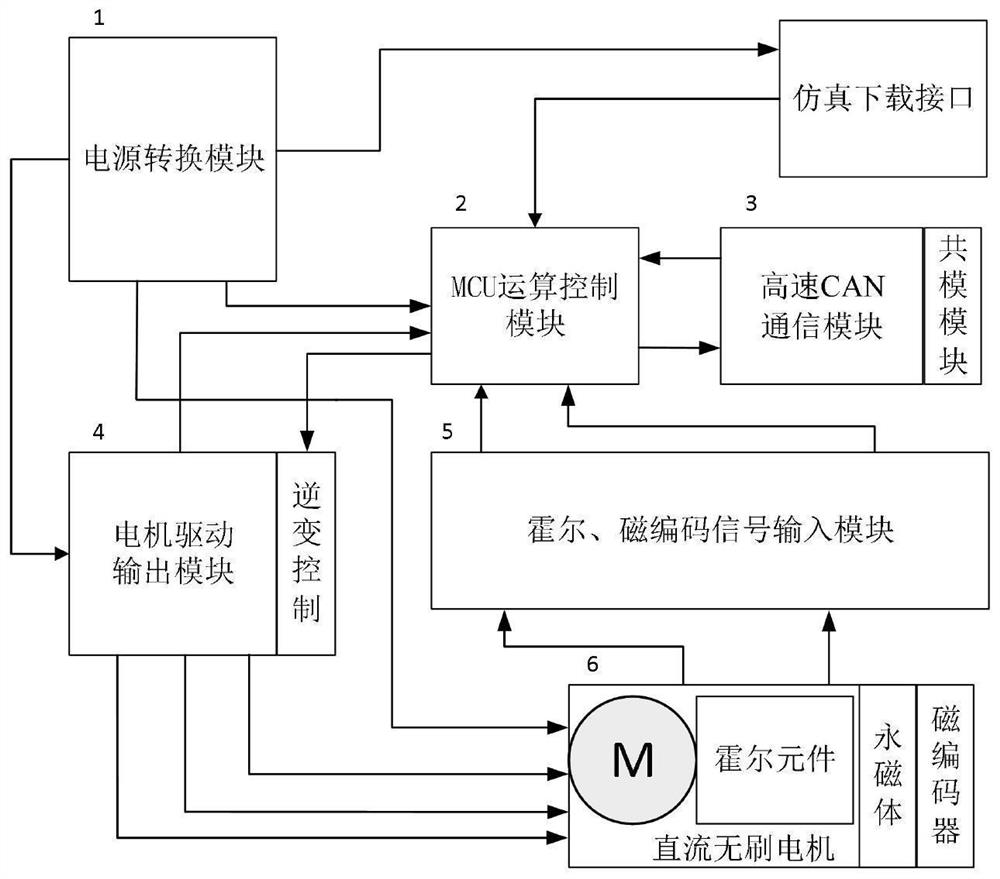
[0029] Such as figure 1 As shown, a small robot joint steering gear transmission error input data acquisition control system, including power conversion module (1), MCU operation control module (2), high-speed CAN communication module (3), motor drive output module (4) , Hall, magnetic encoding signal input module (5), DC brushless motor module (6).
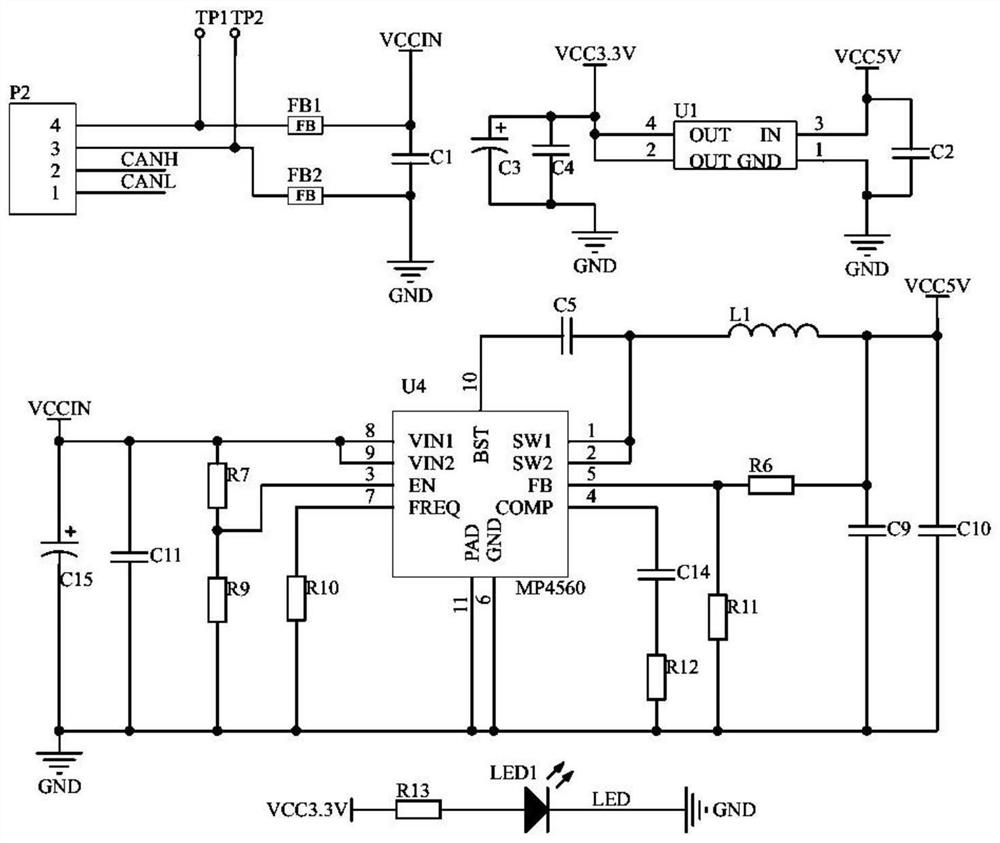
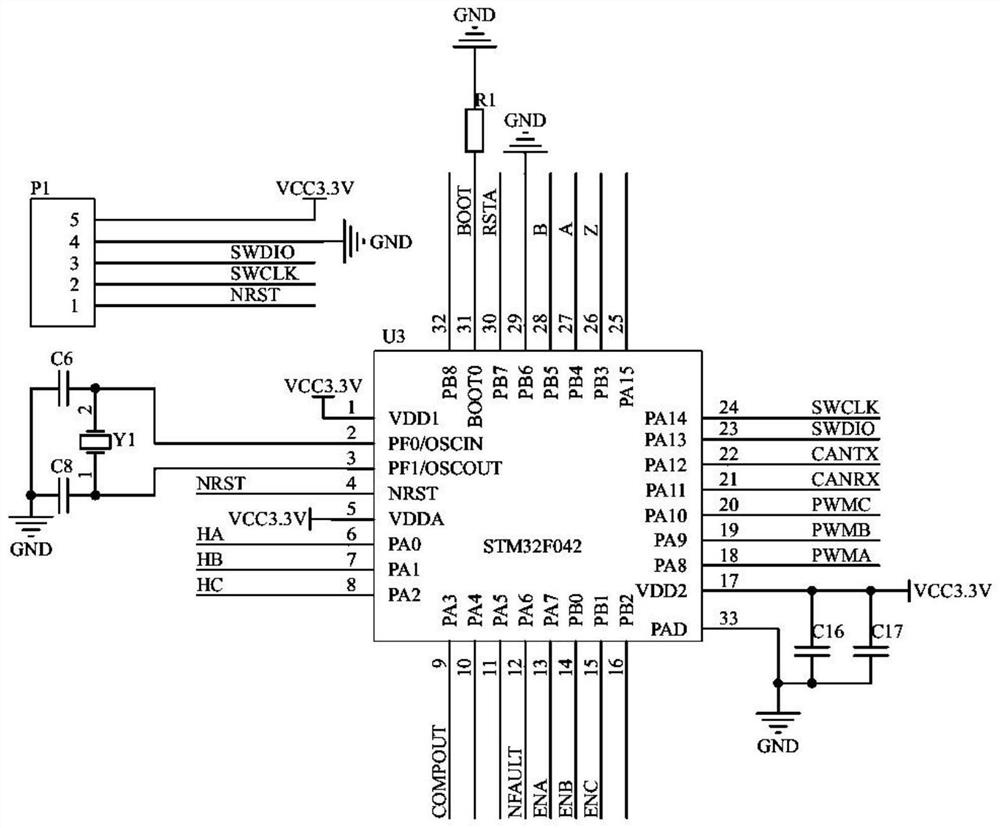
[0030]The DC 12V voltage is connected to the power conversion module (1) after the fuse is fused and restored, and the DC 5V voltage is output. The DC 5V voltage passes through the DC-DC low-voltage conversion chip and then outputs a 3.3V voltage. The output voltage is the MCU operation control module (2) Power supply, the magnetic encoder module (6) at the tail of the DC brushless motor supplies power, the simulation download interface supplies power, and the input DC 12V voltage supplies power to the motor drive output...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More