

Multifunctional tea picking robot
A robotic and multi-functional technology, applied in picking machines, manipulators, harvesters, etc., can solve the problems of reduced tea quality, waste of pesticides, low tea picking accuracy, etc., to improve picking quality, rational overall structure, and improve tea picking efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings, but it should be pointed out that the implementation of the present invention is not limited to the following embodiments.
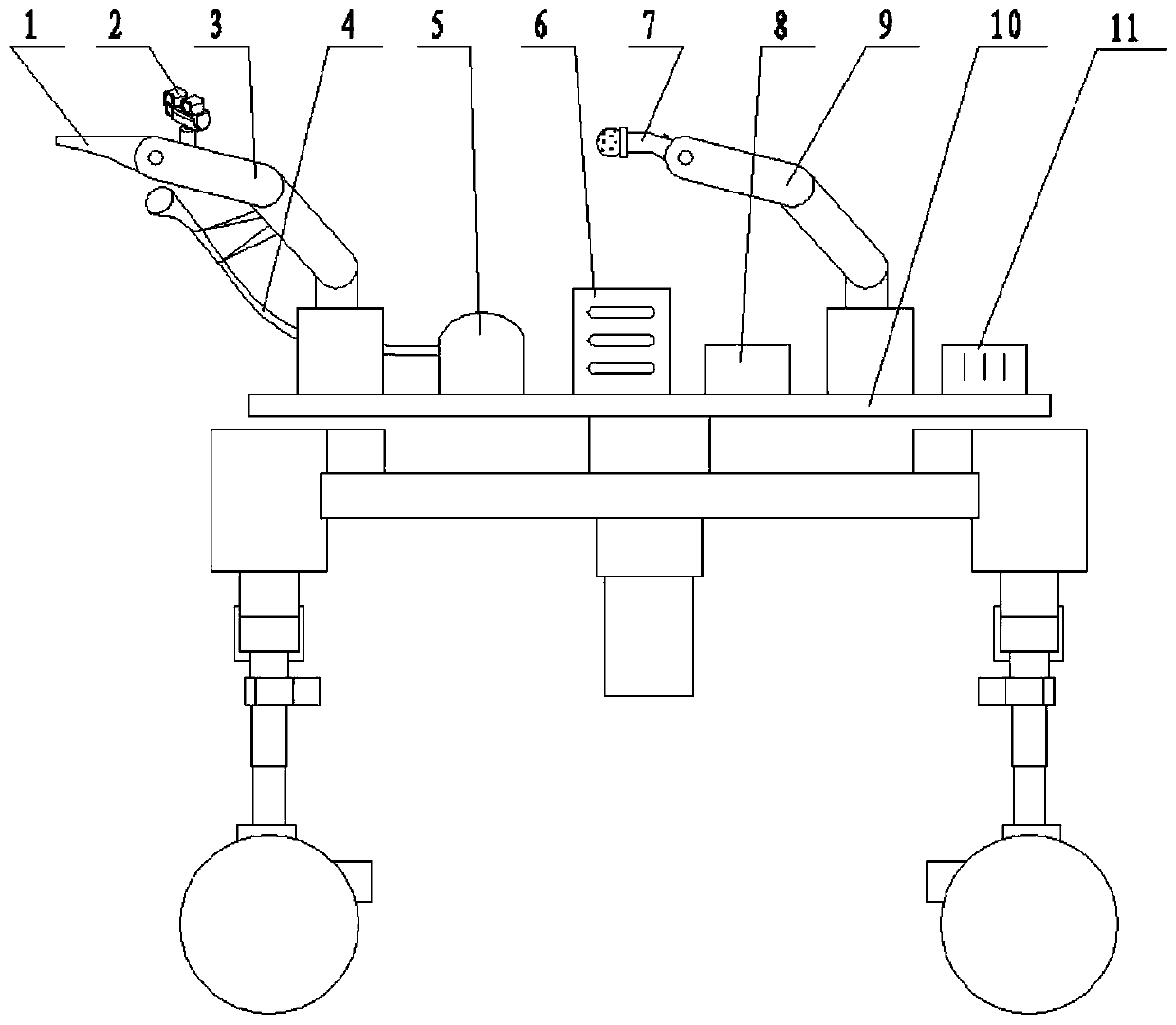
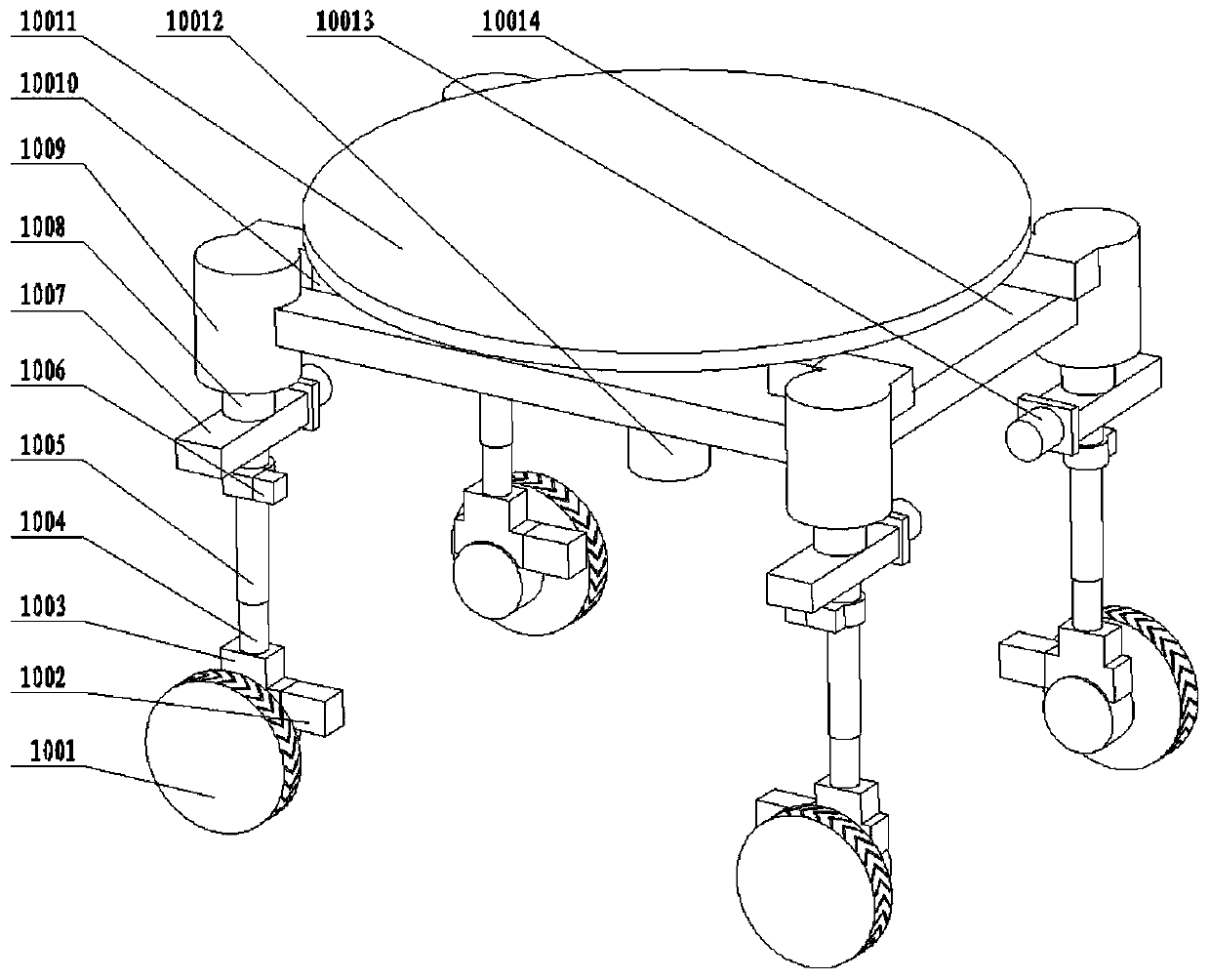
[0037] See figure 1 , a multifunctional tea picking robot, comprising a picking mechanism, a spraying mechanism 7, a power unit 11, a dynamic visual recognition system 2, and an omnidirectional traveling trolley 10; On the top turntable 10011.
[0038] See figure 1 , Figure 12, the picking mechanism is used to pick tea leaves, including an end effector 1, a tea picking robot arm 3, a collection tube 4, and a collection bin 5. The end effector 1 is used to cut off tea leaves, which is a manipulator; the front end and the end of the tea picking robot arm 3 The actuator 1 is connected, and the lower part of the tea-picking mechanical arm 3 is connected to the collection tube 4. The opening at the top of the collection tube 4 is set under the fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More