

Robot feet and legs combined with dry adhesion and hooks, and robot and motion method
A technology of dry adhesion and robot feet, which is applied in the fields of robot feet and legs, robots and sports, and non-structural terrain mobile platforms. It can solve the problems of increasing the control difficulty of legged robots, single legged robots, and no research has been carried out. Achieve good all-terrain adaptability, shock absorption and buffering capacity, small size, efficient and stable movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with accompanying drawing and specific embodiment, the present invention is further described in detail:
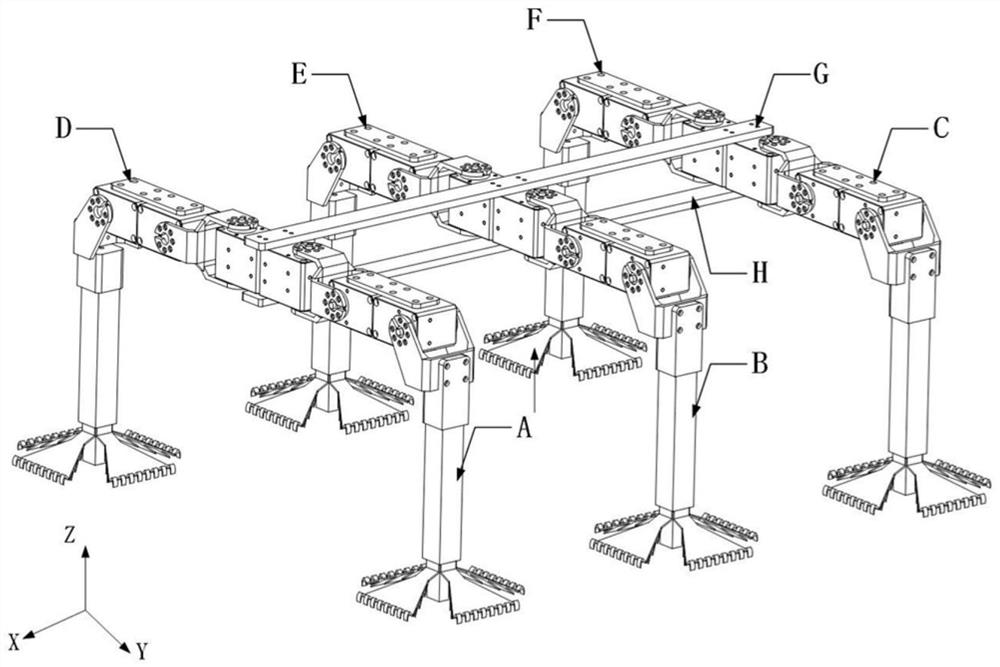
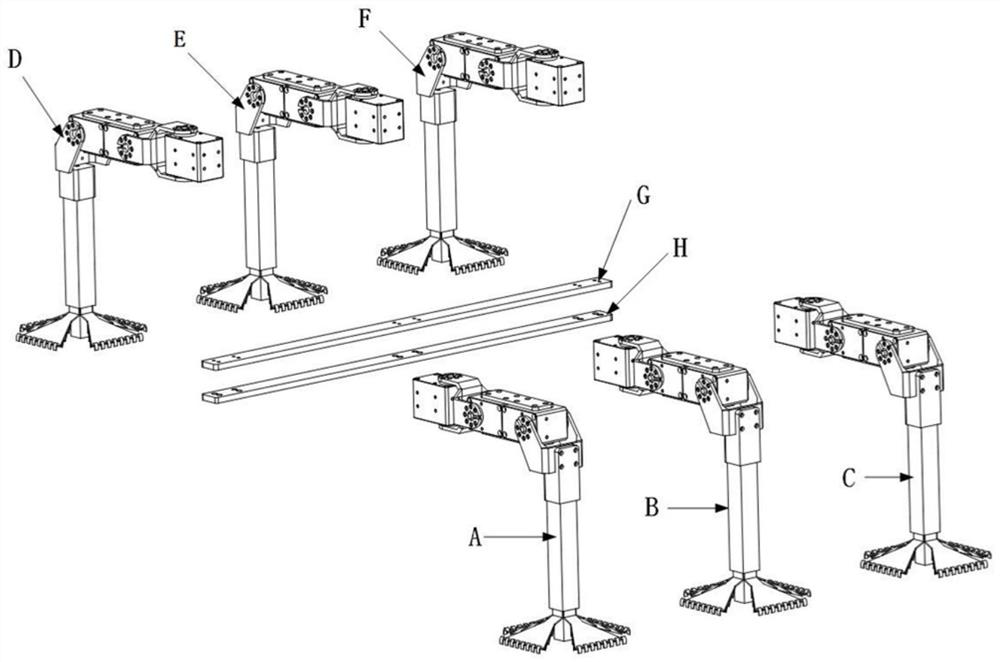
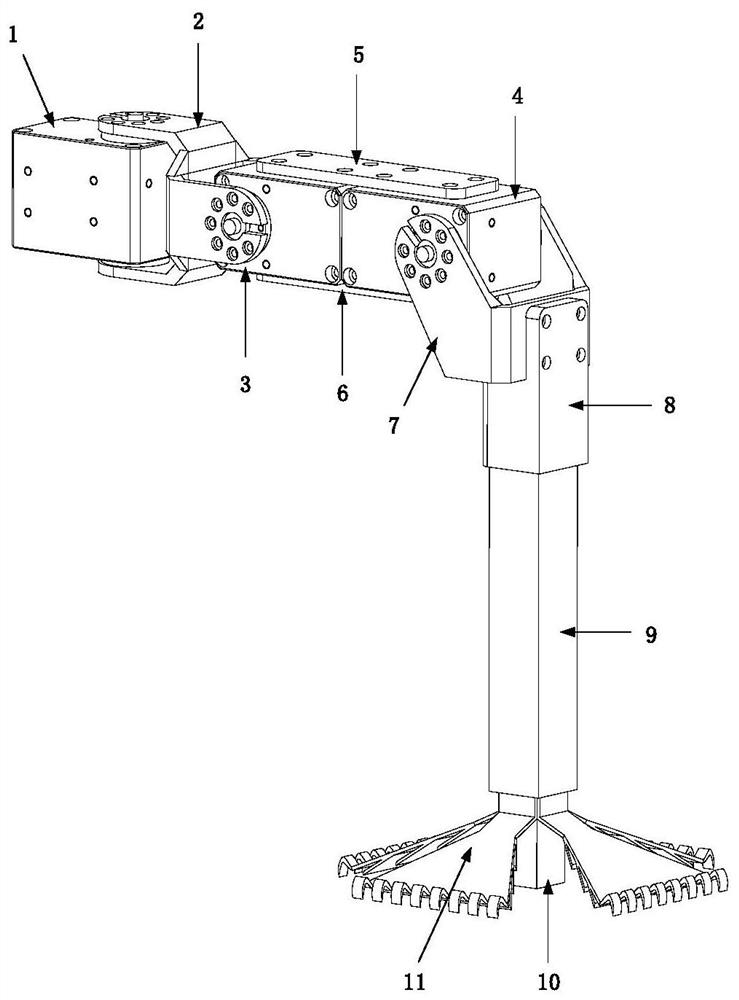
[0030] combine Figure 1-9 , The purpose of the present invention is to provide a machine foot with dry adhesion and hook claw combination, which is characterized in that it includes a damping shock-absorbing telescopic sleeve 9, a damping shock-absorbing telescopic rod 10, and a shock-absorbing spring 15, four symmetrically installed on the damping The hook foot sole 11 at the lower part of the shock-absorbing telescopic rod 10 .
[0031] The upper end of the damping and shock-absorbing telescopic rod 10 is installed in the damping and shock-absorbing telescopic sleeve 9, and the shock-absorbing spring 15 is installed between the damping and shock-absorbing telescopic sleeve 9 and the upper end of the damping and shock-absorbing telescopic rod 10; The elastic sole surface 11-1, the fixed hook 11-2, and three pieces of dry adhesive material 11...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More