

High-speed protection method for electric vehicle resolver fault
A technology for electric vehicles and variable faults, which is applied to electric vehicles, electrical devices, emergency protection circuit devices, etc., can solve problems such as MCU bombing, MCU cannot execute protection measures, and MCU cannot obtain motor speed and position information, etc., to achieve High accuracy, prevent MCU bombing, and simple calculation method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
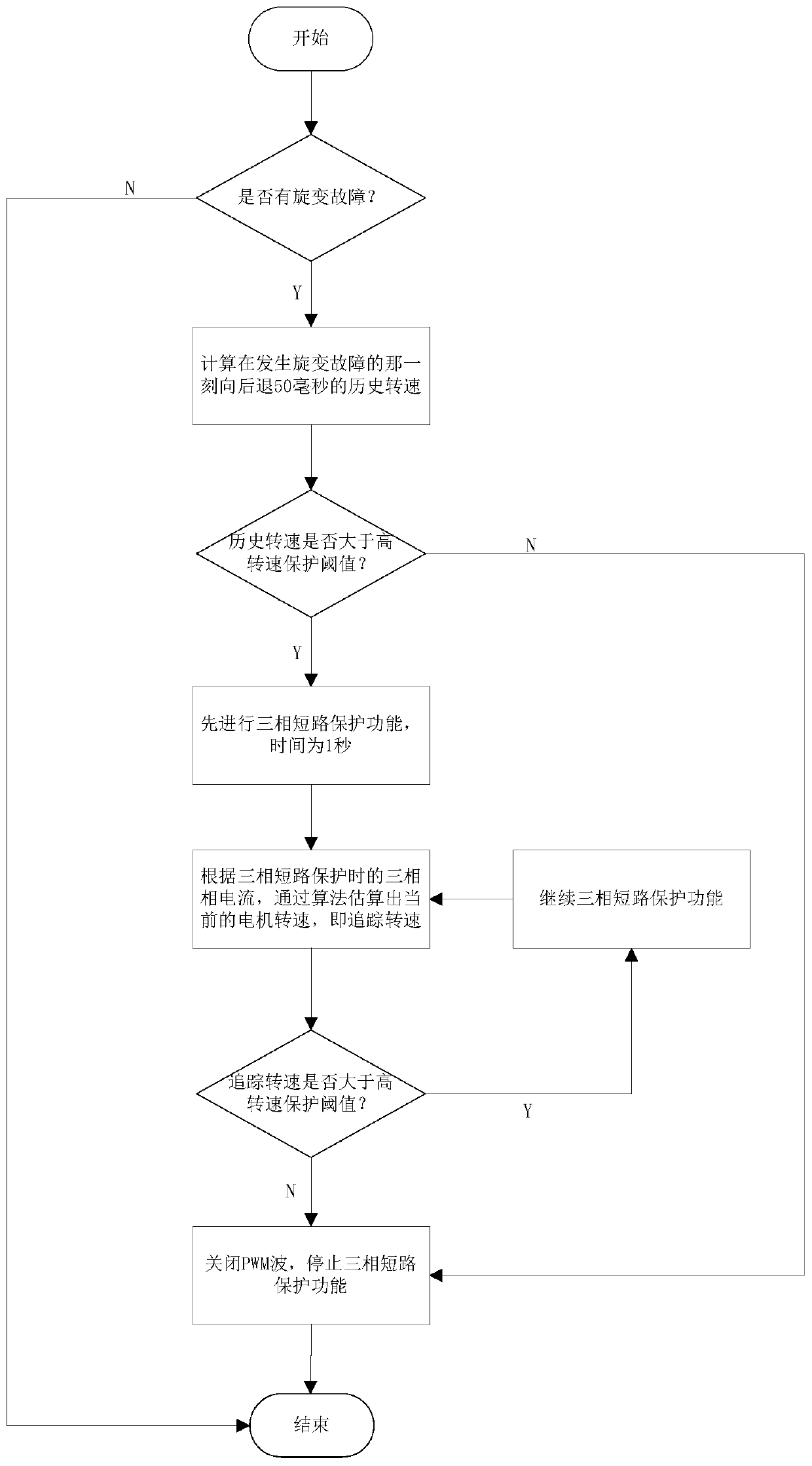
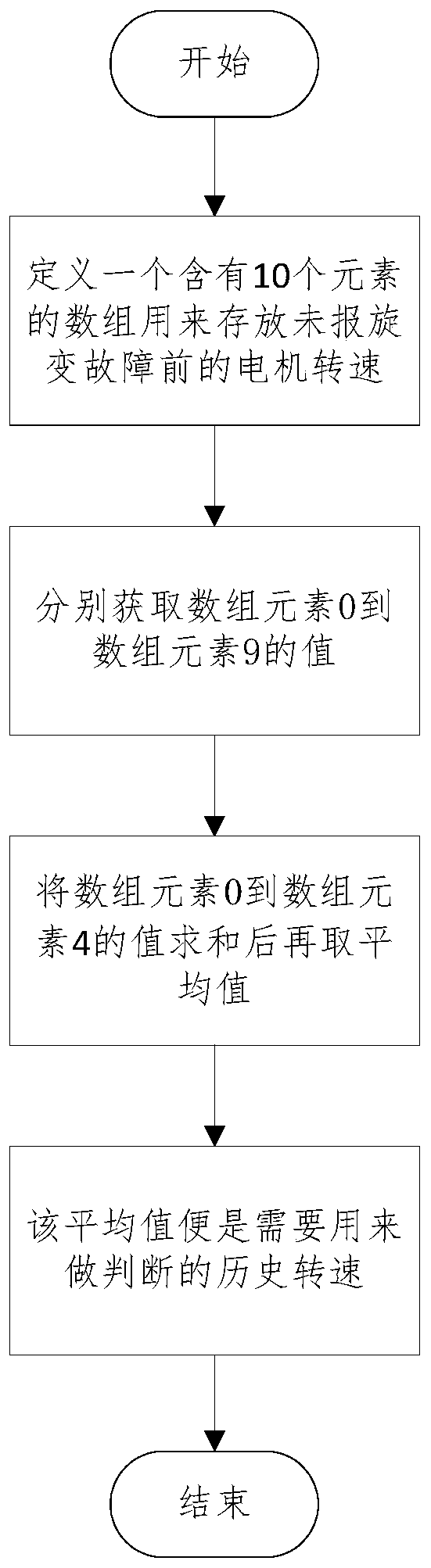
[0039] Such as figure 2 As shown, taking 10 storage units and storing them every 10 milliseconds as an example, calculate the elapsed speed corresponding to the moment when the resolver failure occurs and goes back 50 milliseconds.
[0040] Define a continuous storage unit with a length of 10 array elements (that is, storage unit 0 to storage unit 9), which is used to store the motor speed before the resolver failure is reported. Then, the value of each storage unit is obtained, the specific process: the storage unit 9 is always used to store the motor speed value collected by the current resolver, and the data stored in the current storage unit is transferred to the previous storage unit every 10ms. The data stored in the storage unit 9 is transferred to the storage unit 8, the data stored in the storage unit 8 is transferred to the storage unit 7, the data stored in the storage unit 7 is transferred to the storage unit 6, and so on until the data stored in the storage unit ...
Embodiment 2
[0049] In this embodiment, k is 6, and t 2 Calculate the tracking speed for 100 ms as an example. Its calculation process is as follows:
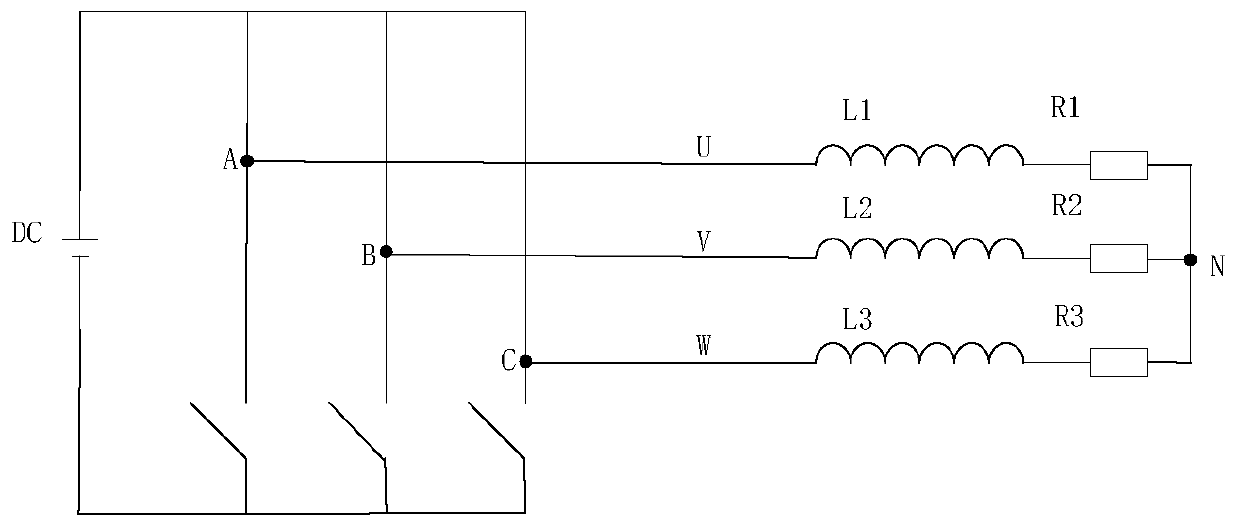
[0050] 1) The formula for calculating the synchronous speed of the motor is:
[0051]
[0052] In the formula, n represents the speed of the motor in rpm (revolutions per minute); f represents the electrical frequency of the motor in Hz (Hertz); p represents the number of pole pairs of the motor.
[0053] The period T of the motor phase current can be obtained from formula (1), such as formula (2):
[0054]
[0055] In the formula, T represents the period of the phase current of the motor, and the unit is S (second).
[0056] 2) Define a variable Pulse_CNT with an initial value of 0 for counting. This variable counts 6 times every phase current cycle, that is, Pulse_CNT=Pulse_CNT+6; when the counting time of 100 milliseconds is completed, read the total count value Pulse_CNT.
[0057] From this, the following relationship can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More