

Unmanned electric vehicle trajectory tracking and transverse stability comprehensive control method
A technology for lateral stability and electric vehicles, which is applied in the field of automotive intelligent safety and automatic driving. It can solve problems such as single trajectory tracking control, single lateral stability control, and the impact of unmanned electric vehicle motion control performance, so as to improve quality, Overcoming the effects of tire cornering stiffness uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
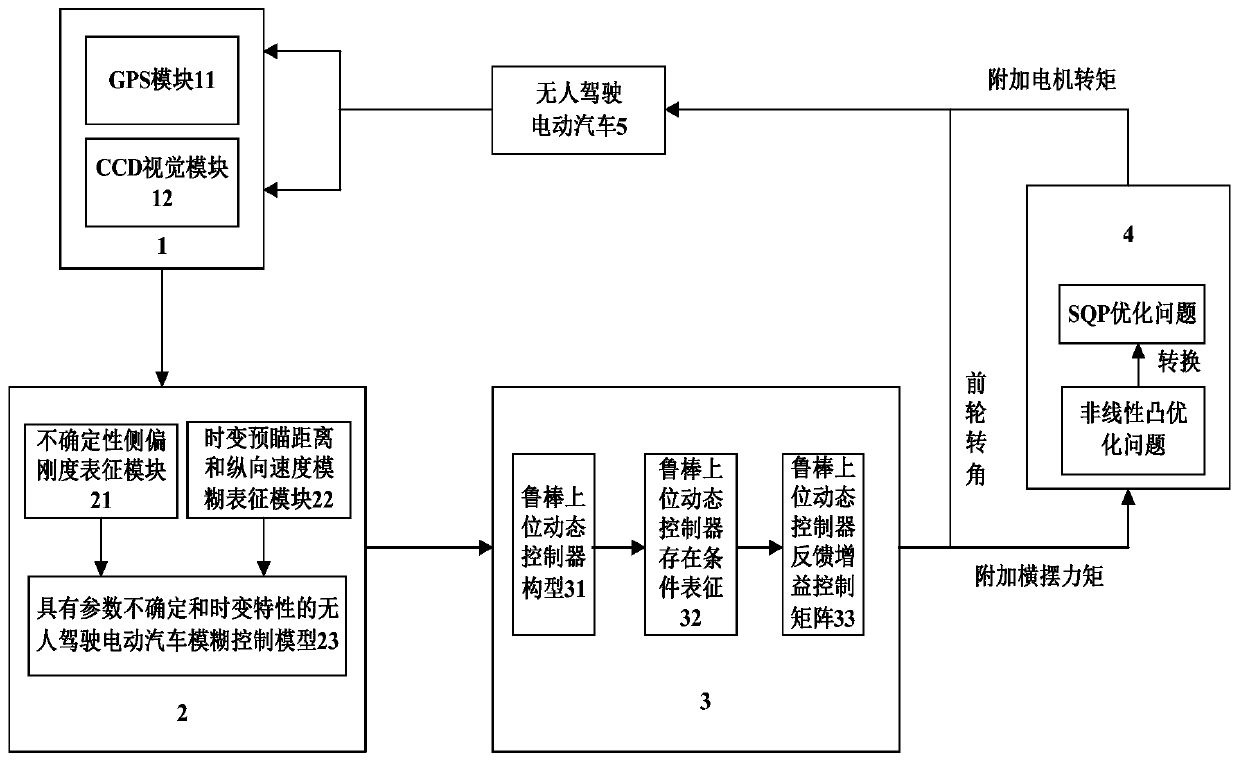
[0037] like figure 1 As shown, the unmanned electric vehicle trajectory tracking and lateral stability comprehensive control system described in the present invention includes an on-board sensor module 1, a Takagi–Sugeno fuzzy lateral control model characterization module 2, a robust H ∞ Output feedback upper-level dynamic controller module 3 and sequence quadratic programming (SQP) lower-level control distribution module 4, etc.;
[0038] The input terminal of the vehicle-mounted sensor module 1 is connected to the unmanned electric vehicle 5, the vehicle-mounted sensor module 1 includes a GPS module 11 and a CCD vision module 12, the GPS module 11 is used to collect the driving state information of the unmanned electric vehicle, and the CCD vision module 12 It is used to detect the position information of the vehicle relative to the expected trajec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More