Industrial robot walking shaft
A technology for industrial robots and walking mechanisms, applied in manipulators, manufacturing tools, etc., can solve the problems of inability to turn, the structure is not optimized enough, the design is not reasonable enough, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
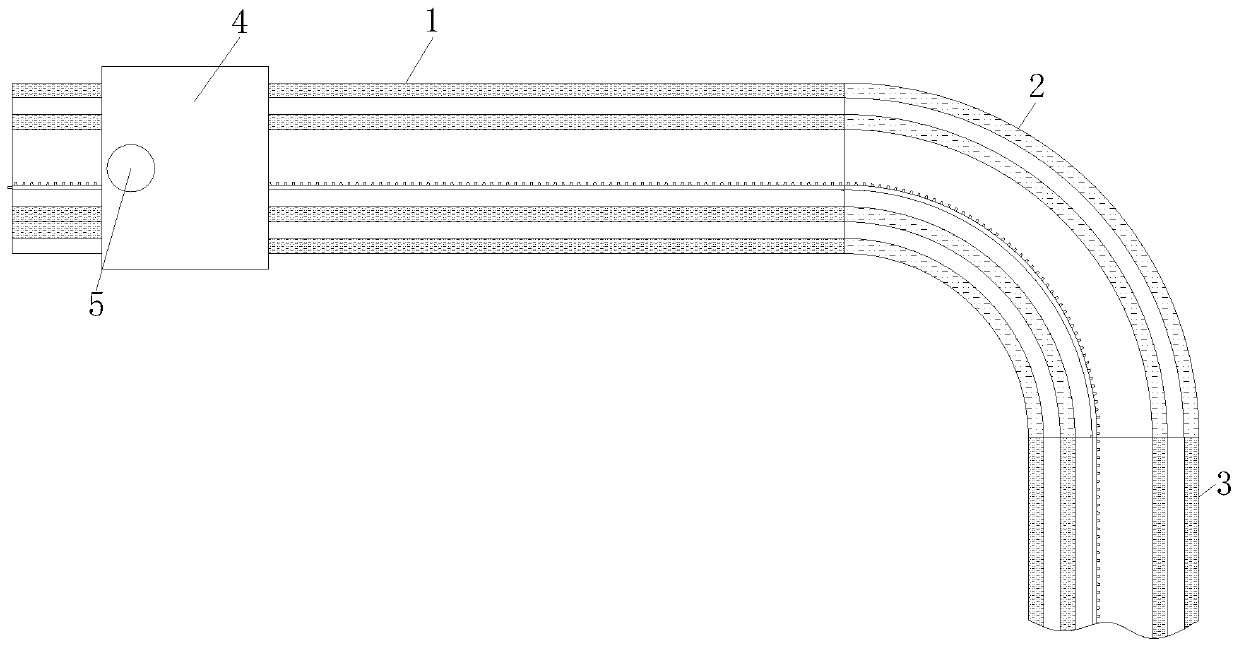
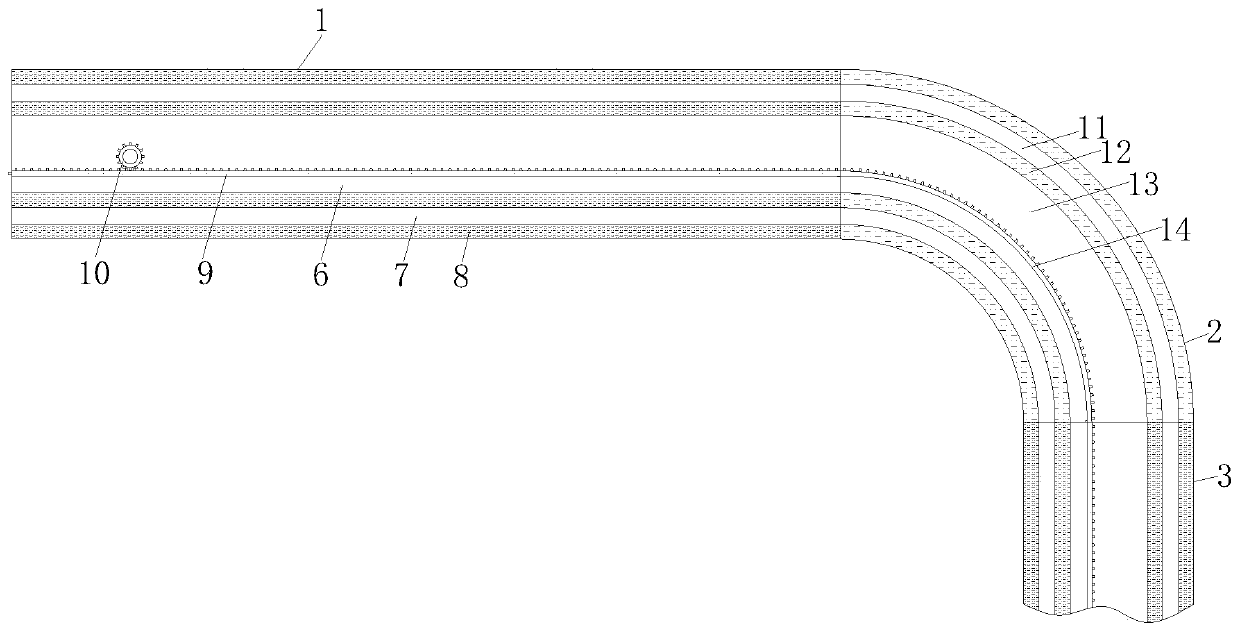
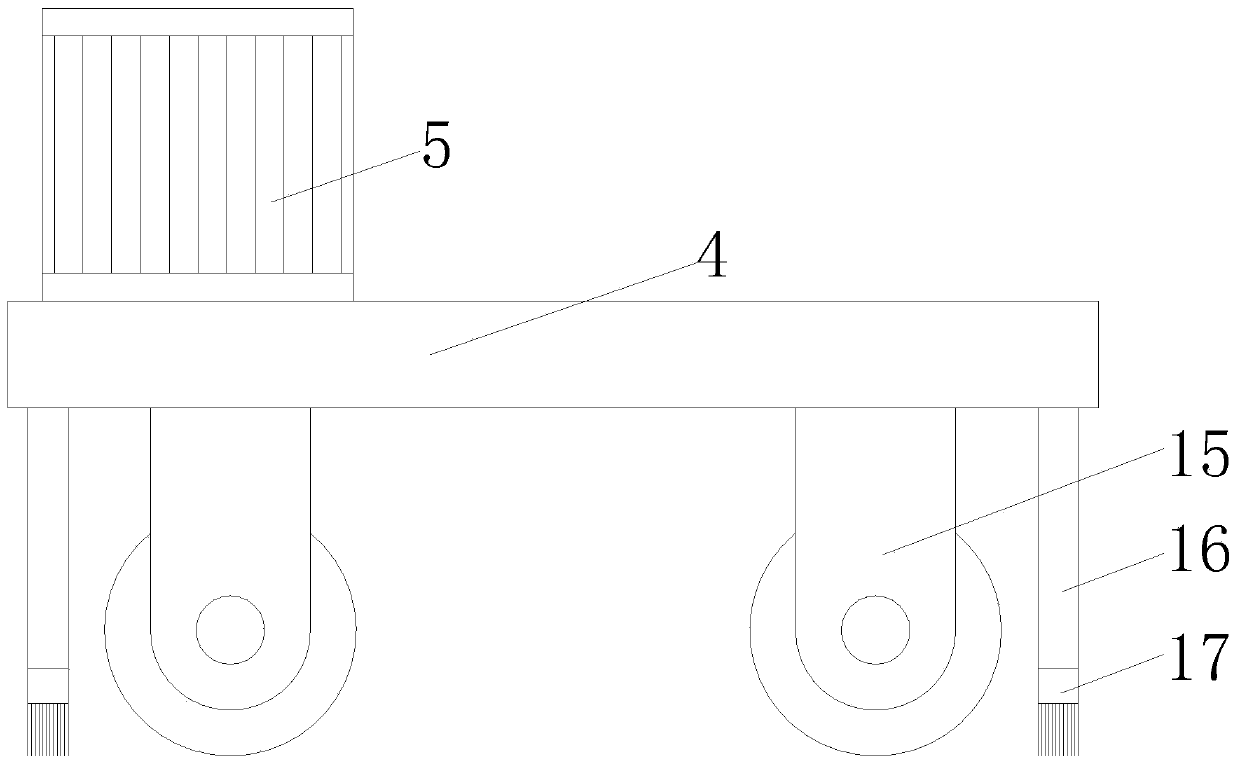
[0023] see Figure 1-5 , in the embodiment of the present invention, an industrial robot walking axis includes a first traveling mechanism 1, an arc-shaped connection mechanism 2 and a second traveling mechanism 3, and the first traveling mechanism 1 and the second traveling mechanism 3 have the same structure and size. The top of the first traveling mechanism 1 is provided with a movable plate 4, the first traveling mechanism 1 includes a square seat 6, the top of the square seat 6 is fixedly equipped with two square convex seats 8, and the top of the square convex seat 8 is provided with a square chute 7 , the top of the square seat 6 is fixedly installed with a sq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More