Water surface cleaning robot
A technology for cleaning robots and airframes, which is used in the cleaning of open water surfaces, ship cleaning devices, unmanned surface ships, etc. It can solve the problems of garbage being easily carried out by water flow, slow hull speed and scattering, etc., so as to facilitate cleaning of water surface cleaning machines , Prolonged working time, high collection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
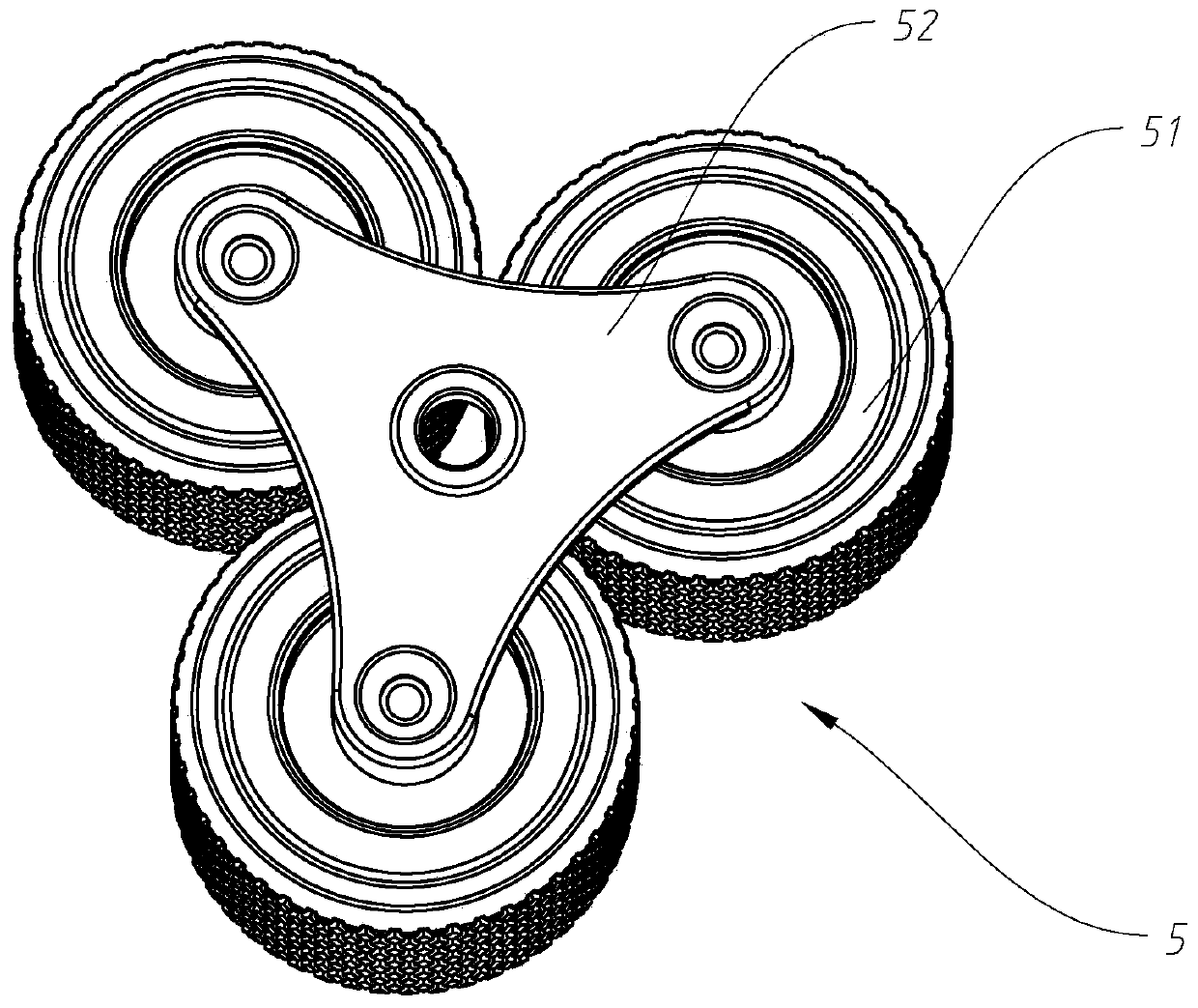
[0111] The anti-collision assembly 5 includes three anti-collision wheels 51 arranged in misplaced positions. The three anti-collision wheels 51 are arranged in a font shape, and the extension directions of the wheel axes are parallel; the anti-collision wheels 51 are evenly distributed to ensure that no matter from which angle When colliding with the anti-collision assembly 5, it can meet with one of the anti-collision wheels 51. No matter how the anti-collision assembly 5 rotates, it can also ensure that at least one anti-collision wheel 51 corresponds to other objects. The structure is simple and practical. Compared with the two Wheel setting, three anti-collision wheels 51 are assembled together, can further strengthen anti-collision effect, see Figure 3-4 .
[0112] The connecting piece 52 is a triangular member, and its protruding edge ends are respectively connected with an anti-collision wheel 51 to prevent the connecting piece 52 from interfering with the impact posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com