A lane-changing planning method for intelligent vehicle trajectories
A smart car and trajectory technology, applied in the field of lane-changing trajectory planning for smart cars, can solve problems such as less research, and achieve the effect of simple planning process, smooth and continuous trajectory speed and acceleration, and fast calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
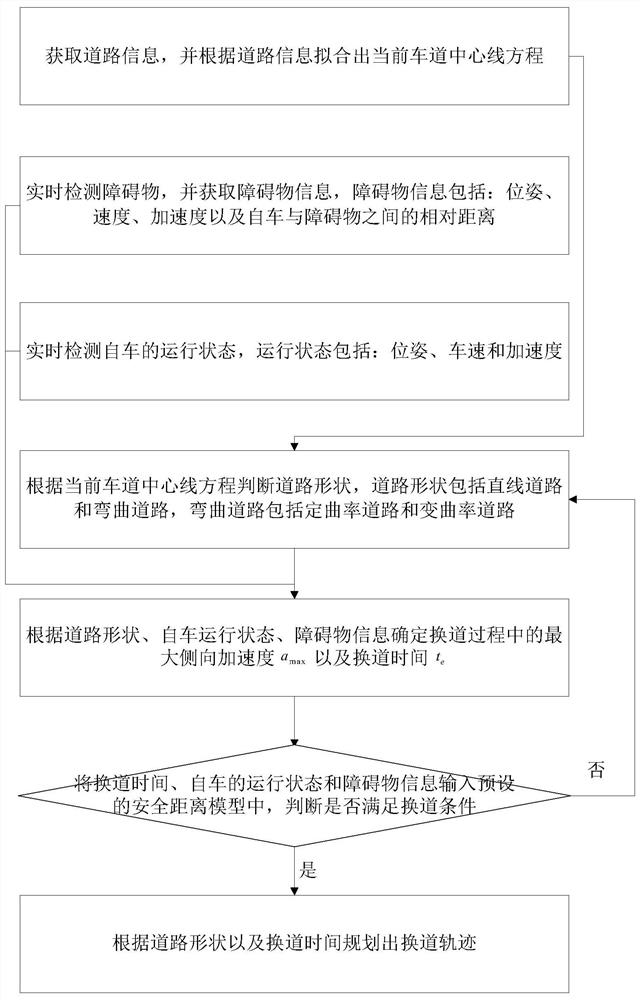
Method used
Image

Examples
Embodiment 1
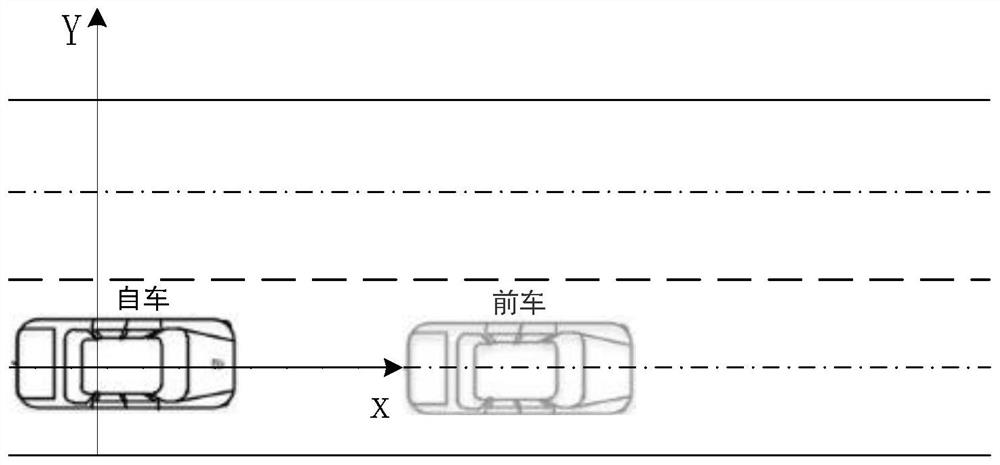
[0108] refer to figure 2 , this embodiment is for vehicles changing lanes on straight roads.
[0109] In this embodiment, a Cartesian coordinate system is established with the traveling direction of the vehicle as the x-axis and the direction perpendicular to the vehicle body as the y-axis. In this way, the lane-changing trajectory of the straight road can be obtained as:
[0110] where the heading angle is
[0111] Find the first derivative with respect to the lateral displacement:
[0112] Find the second derivative with respect to the lateral displacement:
[0113] Find the third derivative with respect to the lateral displacement:
[0114] In the process of changing lanes, the heading angle of the vehicle is relatively small, so the first and second derivatives of y can be considered as lateral velocity and lateral acceleration.
[0115] make available root t 1 =0.25t e or t 2 =0.75t e , according to the extreme value principle, it can be known that t...
Embodiment 2
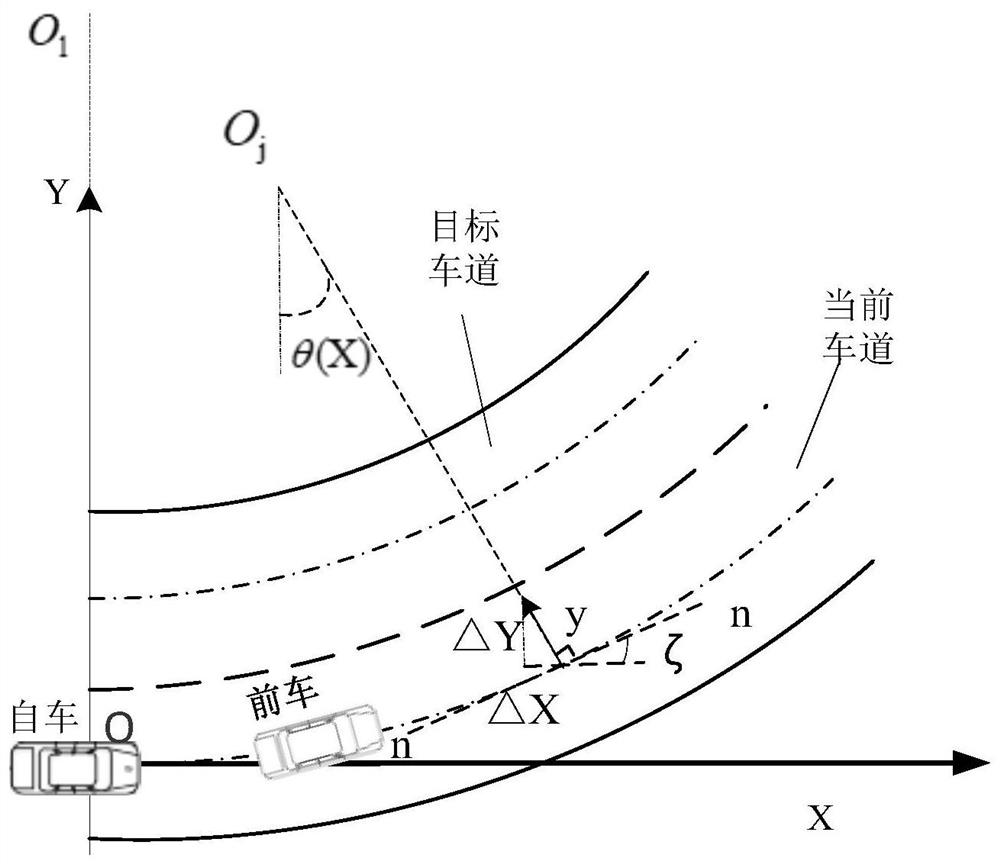
[0118] refer to image 3 , this embodiment is for vehicles changing lanes on a curved road. In this embodiment, a rectangular coordinate system is established with the traveling direction of the vehicle as the x-axis and the direction perpendicular to the vehicle body as the y-axis, with the center of mass as the coordinate origin.
[0119] The center of curvature of the vehicle around the road o j The rotational angular displacement θ(X) should be equal to the angle ζ between the tangent of the road centerline at the current position and the X axis, namely: θ(X)=ζ=arctan(f'(X)).
[0120] The motion of the center of mass of the vehicle changing lanes on a curved road is decomposed into a straight line motion from the center of mass of the car to the center of curvature of the road and a circular rotation around the center of curvature of the road. The law of linear motion from the center of mass to the center of curvature of the road adopts the law of motion of the lateral d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com