Optical device and positioning system of robot
An optical device and robot technology, applied in the field of positioning, can solve the problems of reducing the performance of the robot, unable to respond to the complex and changeable environment in a timely and effective manner, unable to meet the requirements of measurement accuracy and the use of the overall structure at the same time, etc. Use performance, eliminate blind spots, and overcome the effects of detection blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
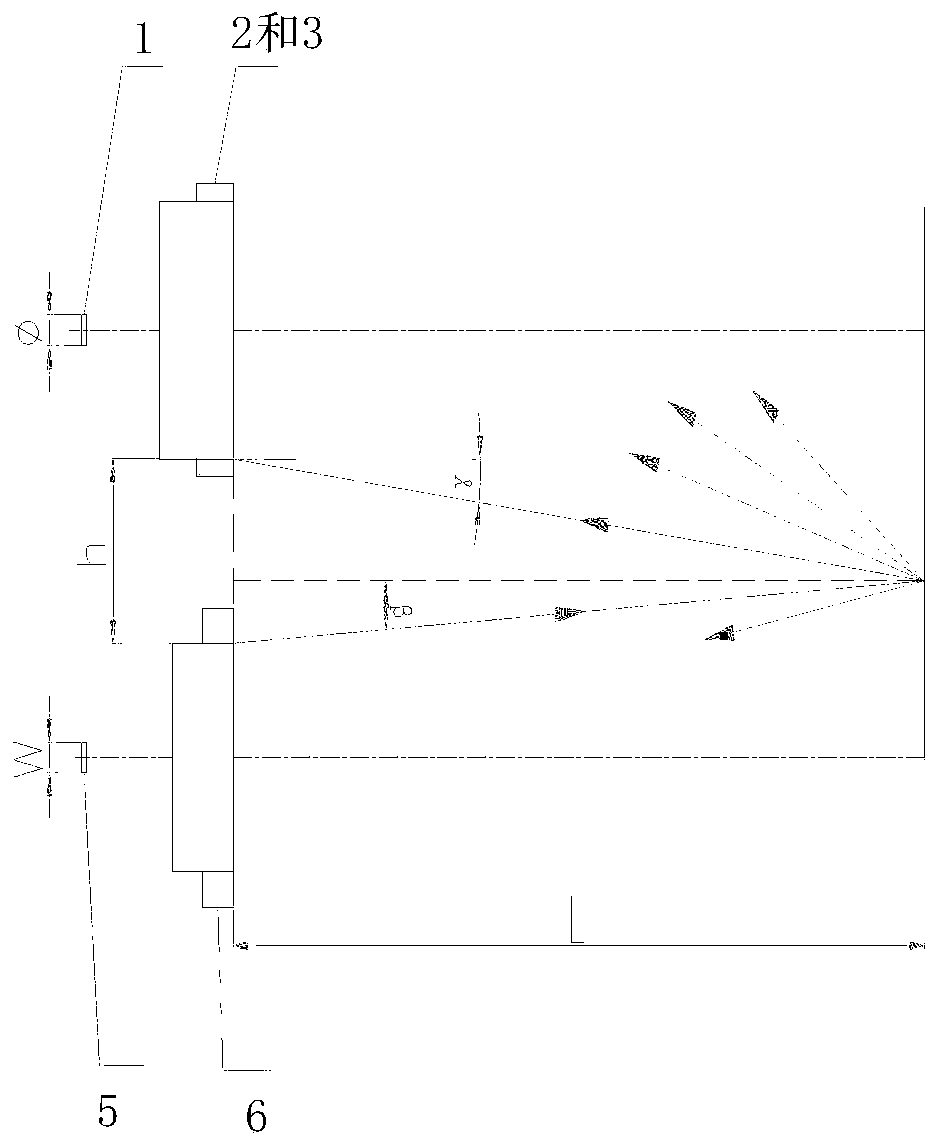
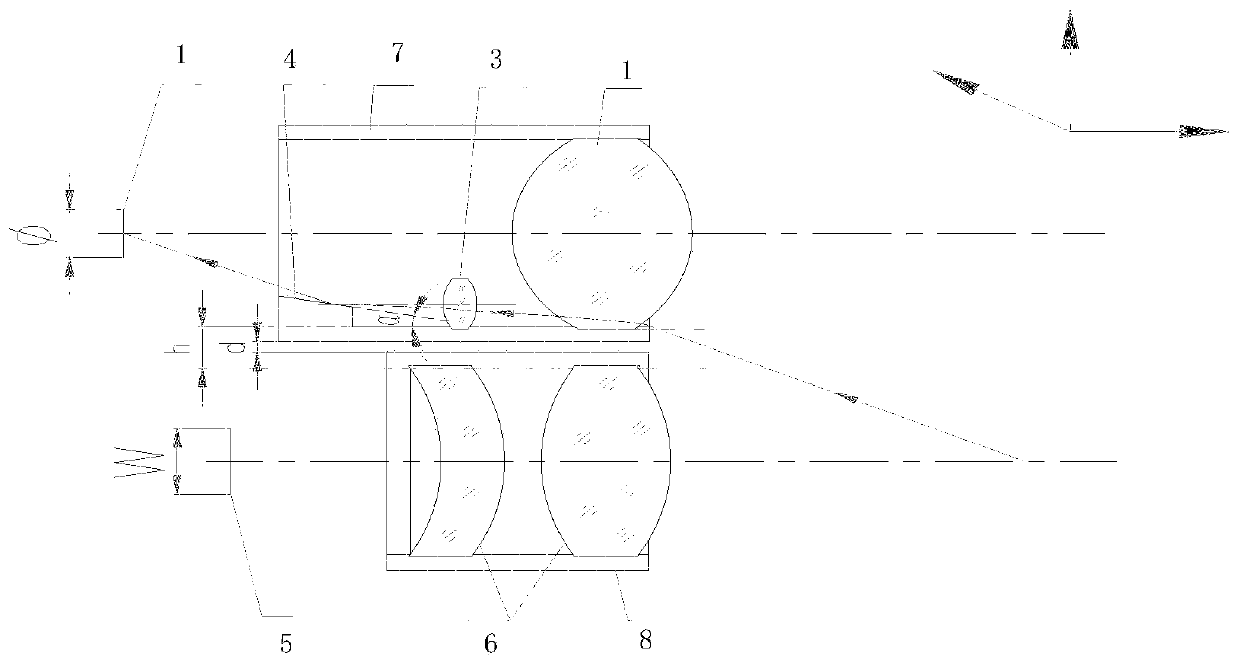
[0014] The following describes the optical device and the positioning system of the robot according to the embodiment of the present invention with reference to the accompanying drawings. Aiming at the problems mentioned in the above-mentioned background technology center that both the common optical axis method and the off-axis method in which the receiving and receiving optical circuits are not coaxial can not meet the measurement accuracy and the use requirements of the overall structure at the same time, the present invention ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



