Integrated multi-degree-of-freedom rigid-flexible coupling motion platform driven by ball screw
A ball screw and rigid-flexible coupling technology, applied in the field of motion platforms, can solve problems such as flexible hinge deformation, large consumables, and tipping, and achieve the effects of preventing deformation in non-working directions, increasing work reliability, and expanding the application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
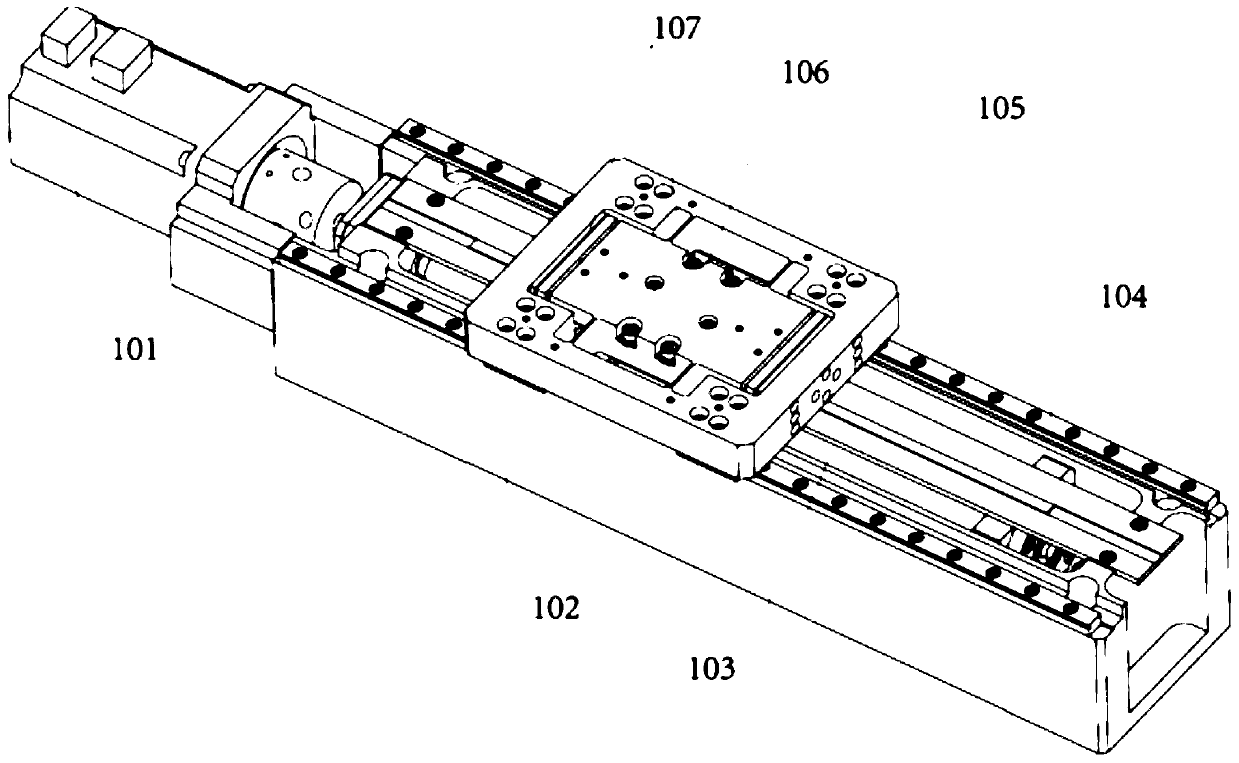
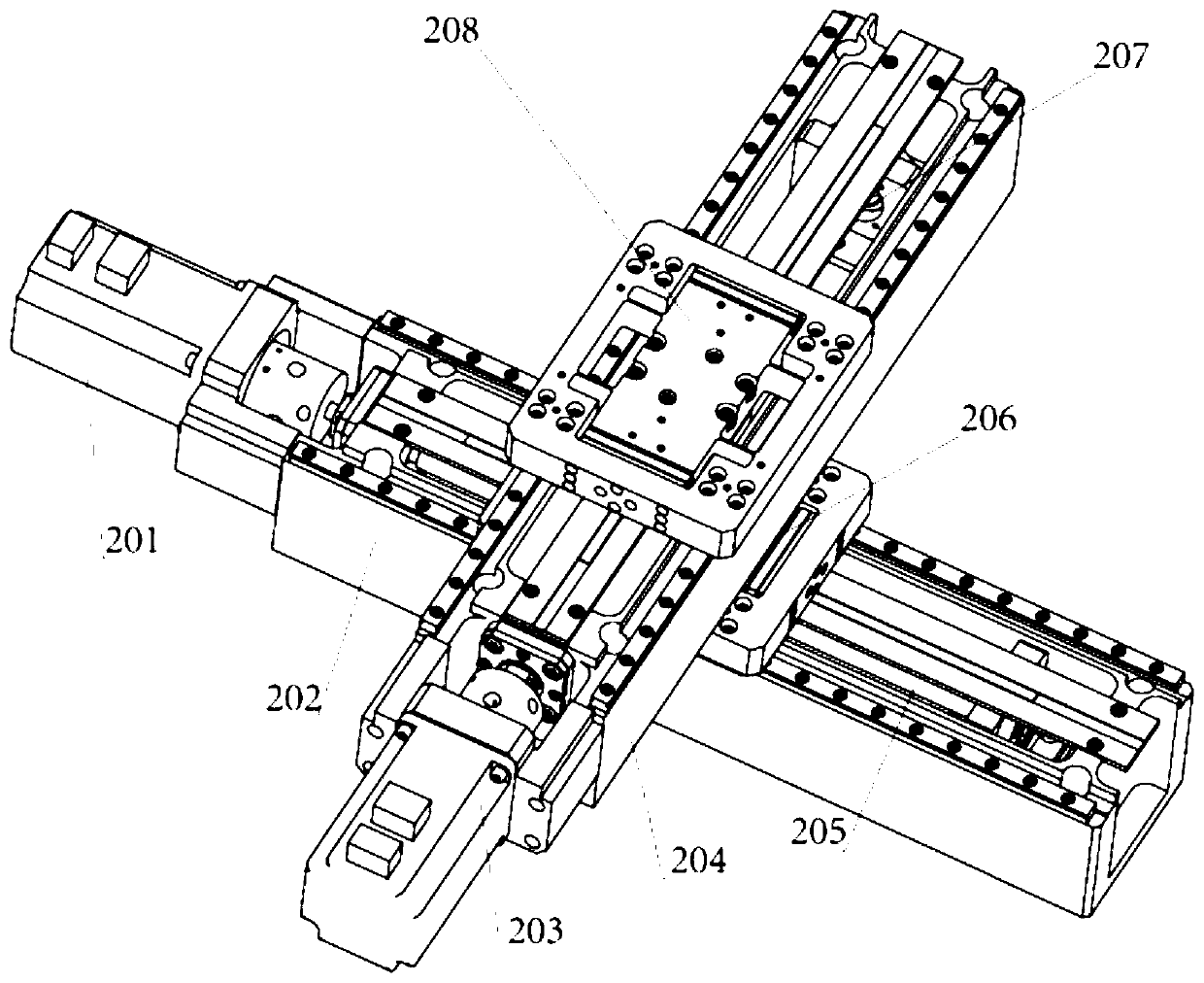
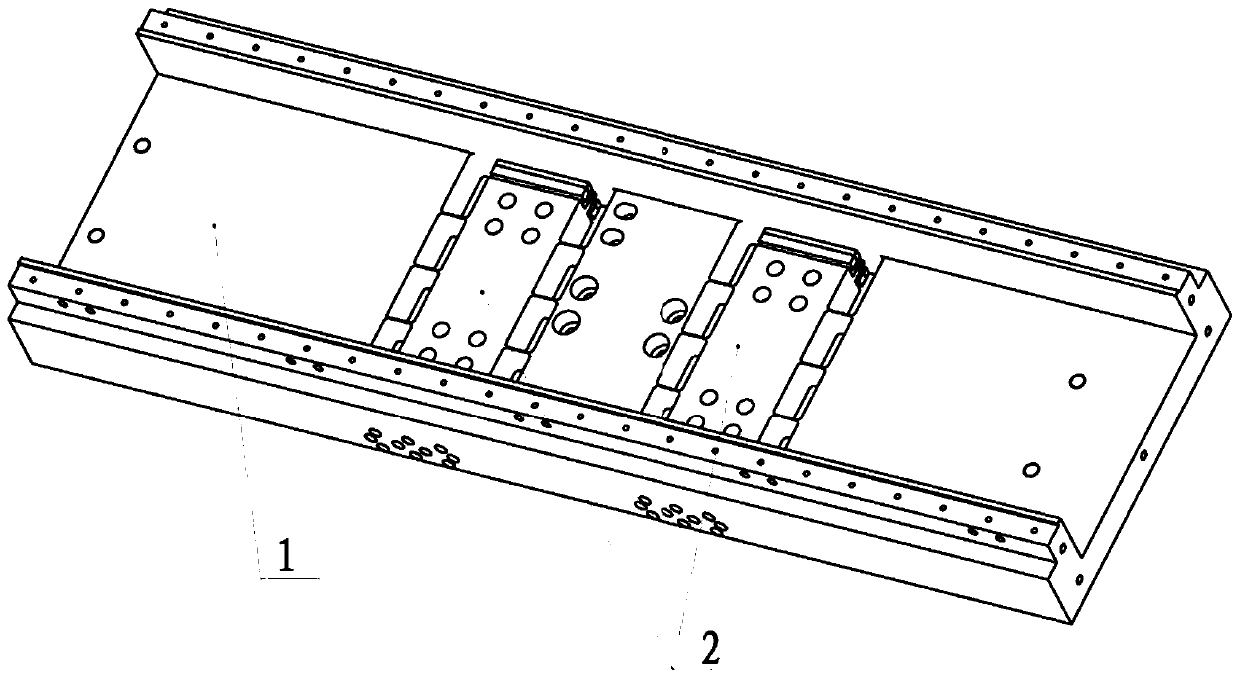
[0040] refer to Figure 3 to Figure 10, this embodiment relates to an integrated multi-degree-of-freedom rigid-flexible coupled motion platform driven by a ball screw, including an X-axis frame 1 and a first flexible hinge platform 2 , the X-axis frame 1 is connected to the Y-axis frame 3 The Y-axis drive device of the frame 3 At the power output end of 31, the Y-axis drive device 31 drives the X-axis frame 1 to slide along the Y-axis direction. The side of the first flexible hinge platform 2 in the X-axis direction is connected to the X-axis frame 1 through the flexible hinge 4. The The side of the first flexible hinge platform 2 in the Y-axis direction is mounted on the X-axis frame 1 through the spring-plate flexible hinge 5; the first flexible hinge platform 2 is provided on each guide rail of the Y-axis guide mechanism, and the guide rail is isolated The influence of friction; the first flexible hinge platform 2 is mounted on the Y-axis frame 3 through the guide mechanism...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More