Three-dimensional laser positioning method and system
A positioning method and three-dimensional laser technology, applied in navigation computing tools and other directions, can solve problems such as low efficiency and poor positioning accuracy, and achieve the effects of increasing the number of particles, stabilizing the final pose, improving query speed and computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
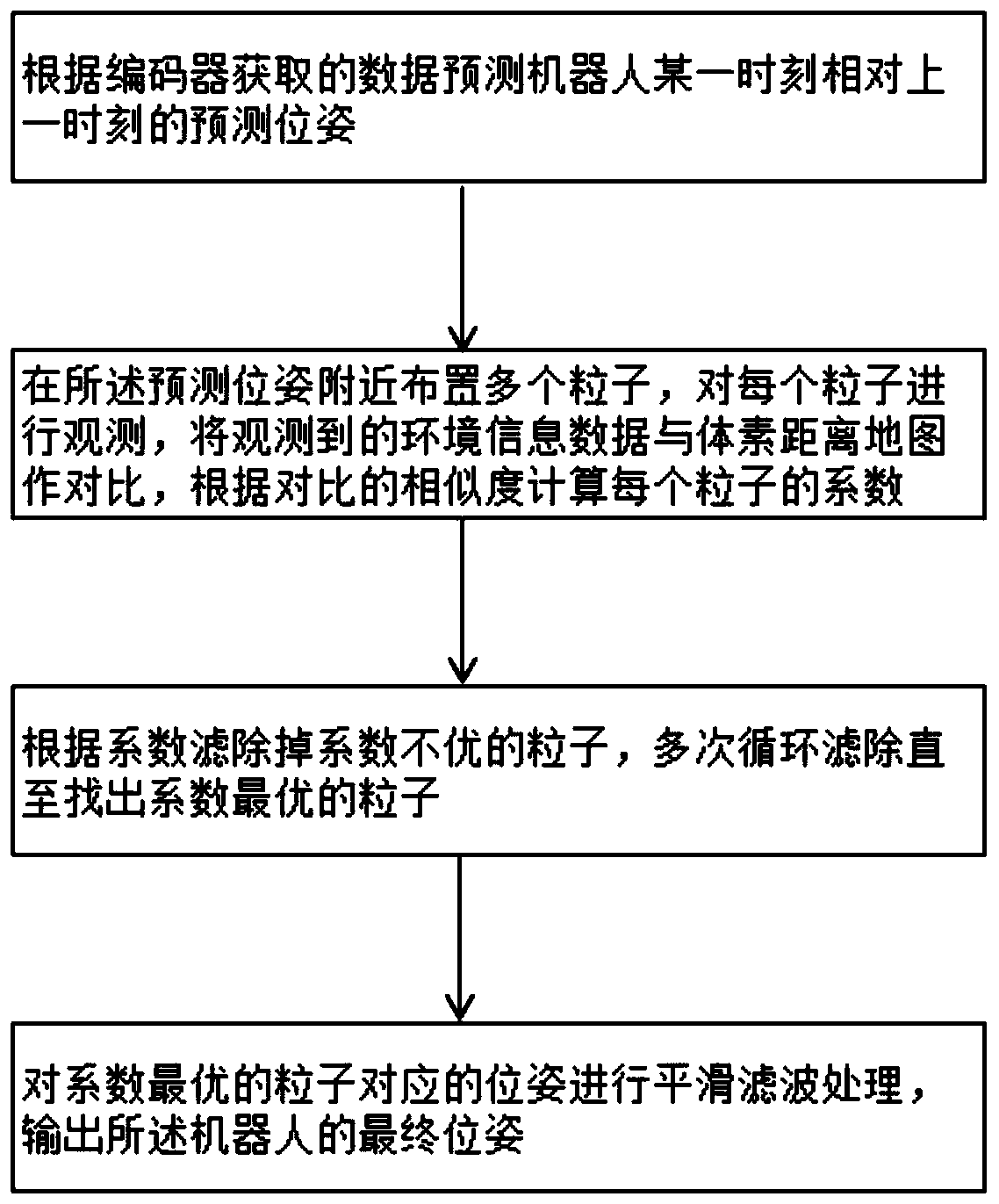
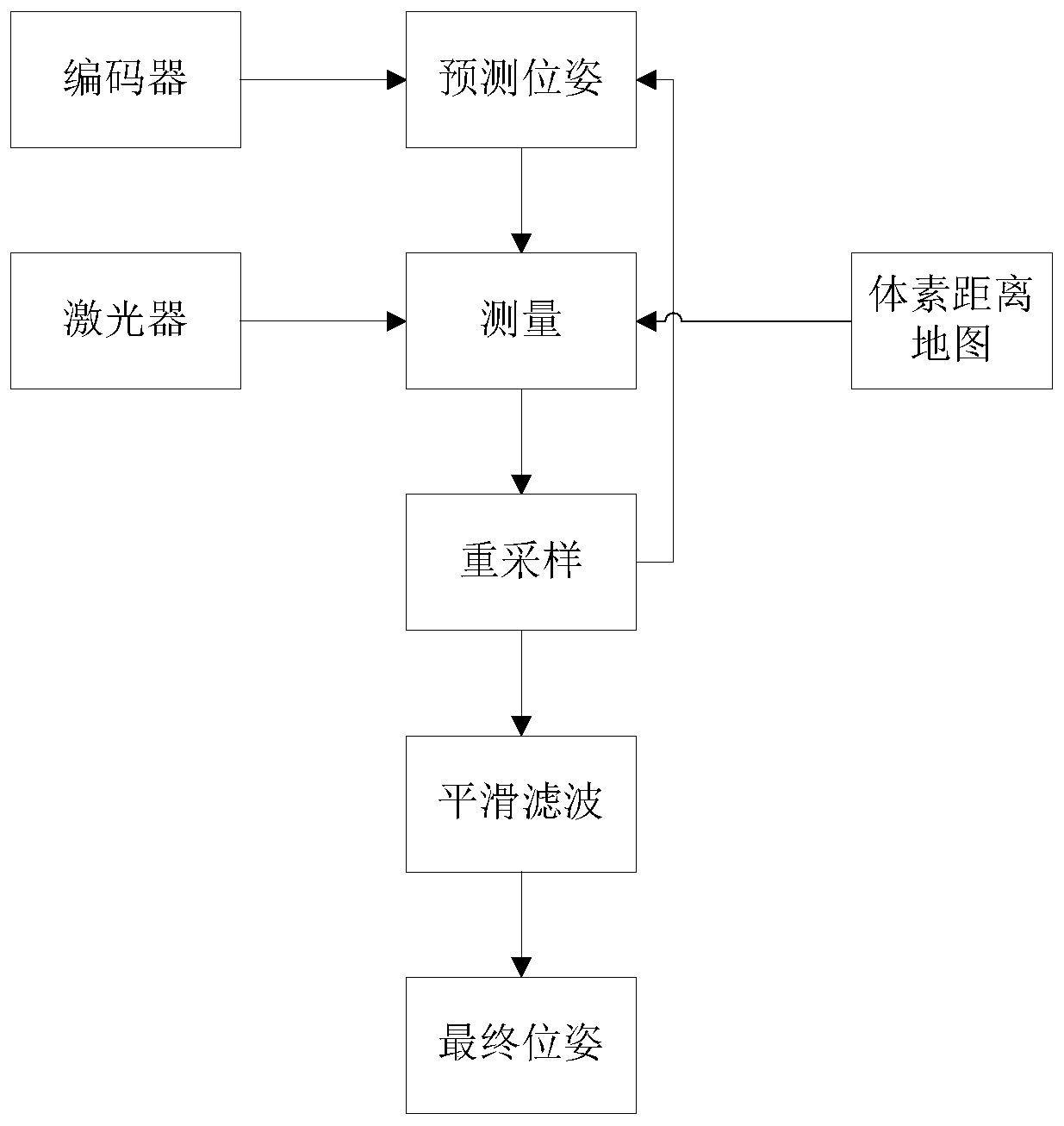
[0024] Such as figure 1 As shown, the present embodiment provides a three-dimensional laser positioning method, including the following steps: Step S1: predict the predicted pose of the robot at a certain moment relative to the previous moment according to the data obtained by the encoder; Step S2: in the predicted pose Arrange multiple particles nearby, observe each particle, compare the observed environmental information data with the voxel distance map, and calculate the coefficient of each particle according to the similarity of the comparison; step S3: filter out the coefficients that are not The particles with the best coefficients are repeatedly filtered out until the particles with the best coefficients are found; Step S4: smoothing and filtering the poses corresponding to the particles with the best coefficients, and outputting the final pose of the robot.
[0025] The three-dimensional laser positioning method described in this embodiment, in the step S1, predict the...
Embodiment 2
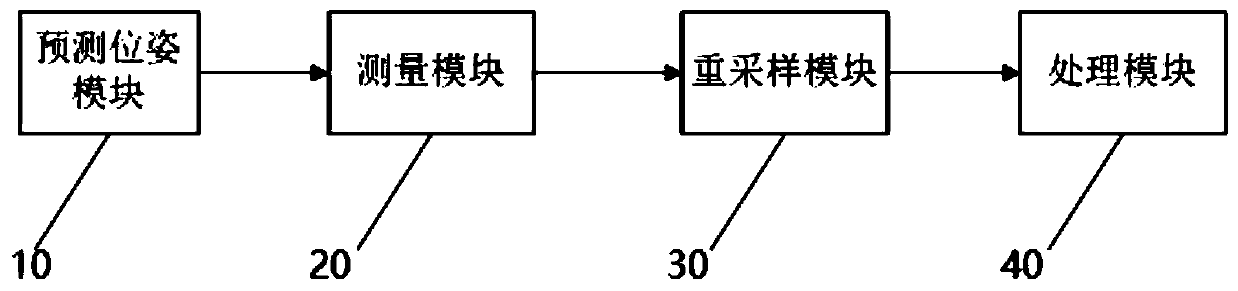
[0033] Based on the same inventive idea, such as image 3 As shown, the present embodiment provides a three-dimensional laser positioning system, and its problem-solving principle is similar to the above-mentioned three-dimensional laser positioning method, and repeated descriptions will not be repeated.
[0034] The three-dimensional laser positioning system described in this embodiment includes:
[0035] The predicted pose module 10 is used to predict the predicted pose of the robot at a certain moment relative to the previous moment according to the data obtained by the encoder;
[0036] The measurement module 20 is configured to arrange a plurality of particles near the predicted pose, observe each particle, compare the observed environmental information data with the voxel distance map, and calculate the distance of each particle according to the compared similarity. coefficient;
[0037] The resampling module 30 is used to filter out the particles with poor coefficient...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com