Attack robot detection method and detection system in multi-robot network
A multi-robot and detection method technology, applied in transmission systems, electrical components, etc., can solve problems such as difficulty in applying miniaturized robots, complexity, etc., and achieve the effect of simple structure, resistance to network attacks, and flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
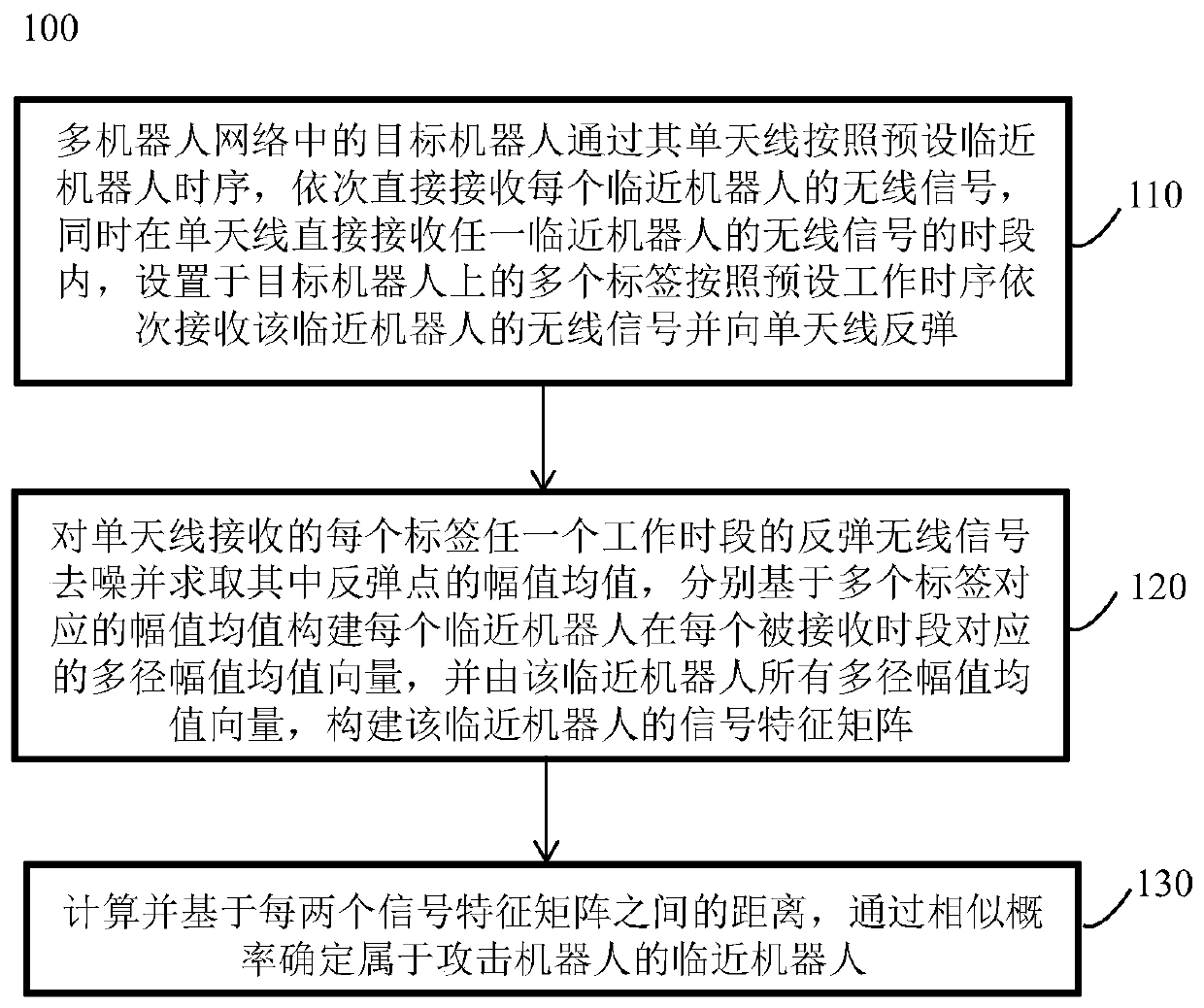
[0045] A detection method 100 for attacking robots in a multi-robot network, such as figure 1 shown, including:
[0046] Step 110, the target robot in the multi-robot network directly receives the wireless signal of each neighboring robot through its single antenna according to the preset timing of the neighboring robot, and at the same time, during the period when the single antenna directly receives the wireless signal of any neighboring robot, set Multiple tags on the target robot receive the wireless signal of the adjacent robot in sequence according to the preset working sequence and bounce to the single antenna;
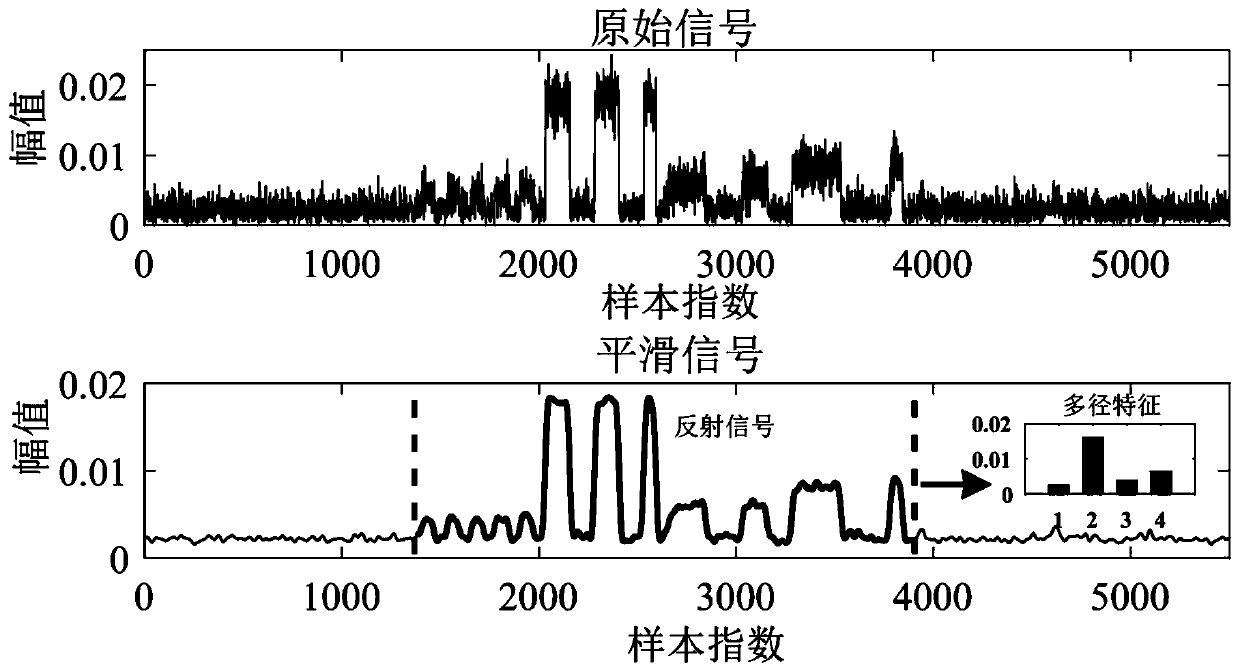
[0047] Step 120, denoise the bounced wireless signal received by the single antenna during any working period of each tag and calculate the mean value of the bounce point, and construct the corresponding amplitude value of each adjacent robot based on the mean value of multiple tags. The multipath amplitude mean vector corresponding to the received period, and...
Embodiment 2
[0092] An attacking robot detection system in a multi-robot network, the system is a target robot in a multi-robot network equipped with antennas, multiple tags and a control processor, wherein the control processor adopts the method described in the first embodiment above Any method for detecting an attacking robot in a multi-robot network controls a single antenna and multiple tags to collect bounced wireless signals and detects the attacking robot of the current robot.
[0093] The relevant technical solutions are the same as those in Embodiment 1, and will not be repeated here.
[0094] Embodiment two
[0095] A storage medium, where instructions are stored, and when a computer reads the instructions, the computer is made to execute the method for detecting an attacking robot in a multi-robot network as described in Embodiment 1 above.
[0096] The relevant technical solutions are the same as those in Embodiment 1, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More